
Изготовление роботапылесоса в домашних условиях своими руками
Изготовление робота-пылесоса в домашних условиях своими руками
Чтобы создать робот-пылесос своими руками, достаточно приобрести необходимый минимум теоретических знаний и набор легкодоступных комплектующих. Такой помощник будет поддерживать полы помещений в чистоте, экономить время на уборке. Благодаря наличию специальных датчиков, механизм самостоятельно не только перемещается по комнате, но и ориентируется в ней. Процесс изготовления в домашних условиях потребует затрат времени и терпения, но схема создания достаточно проста и доступна даже любителям, а затраченные на это средства гораздо ниже цены рыночных аппаратов.
Теоретические аспекты проблемы
Домашние умельцы вывели практическим путем требования к роботам-пылесосам, которых следует придерживаться при их создании. Результатом соблюдения будет механизм, пригодный к дальнейшей эксплуатации. Перечень основных правил следующий:
- рекомендуется изготавливать робот в форме небольшого цилиндра;
- для того, чтобы автомат мог осуществлять развороты на месте – колеса следует размещать по диаметру;
- дополнительному рулевому колесу привод не требуется;
- механизм должен собирать мусор в легко вынимаемый мусороприемник;
- робот обязательно должен быть оснащен контактным бампером, занимающим минимум половину его окружности;
- зарядку аппарата следует проводить от зарядного устройства, без его разборки;
- наилучшим местом размещения центра тяжести у робота являются колеса, также допускается располагать его рядом с ними;
- оптимальная скорость движения – от 25 до 35 см/с;
- двигатели работают совместно с редукторами, оснащенными пружинами.
Выделяются модели с шаговыми двигателями, что позволяет программно управлять ими без применения редукторов.
Способы обеспечения движения, уборки и питания робота-пылесоса
Движение роботизированного устройства в общем случае осуществляется двумя способами: по спирали (с центра наружу) и зигзагами. В микроконтроллеры можно также занести и схемы комнат по отдельности.
Пространственную ориентацию, объезд препятствия на пути следования пылесос осуществляет благодаря встроенным контактным и инфракрасным датчикам — они образуют систему обратной связи. Инфракрасные регулируют движение, определяя расстояние до стен, предметов, перепады высот. Контактные датчики срабатывают в бамперах при ударах о препятствия (подробнее о том, как работает прибор — в статье принципы работы роботов пылесосов).
Автоматизированный пылесос с автономным источником питания, конечно же, не развивает такую мощность всасывания, как ручной вариант. Практические испытания показали большую эффективность использования маленькой щетки совместно с всасывающей турбиной. Для уборки по углам передняя часть пылесоса оснащается 2 щетками, которые при работе подгребают мусор к главной.
Питание роботизированной системы можно осуществлять от нескольких аккумуляторов, напряжение на клеммах которых – 12 V (18 V), а его емкость равняется 7 А*ч. Зарядка осуществляется при прямом контакте либо беспроводным способом. Применение последнего увеличивает расходы на комплектующие детали.
Самостоятельный возврат робота к месту зарядки – сложная задача, которую можно решить установкой передающего маяка.
Любая автоматизированная модель собирается на базе контроллера (мозга системы). Поэтому следует изучить язык его программирования для занесения алгоритма команд. Следует также учитывать интуитивную направленность командного интерфейса, что значительно облегчает процесс. Как микроконтроллер, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений, поэтому пайка требуется редко.

Подготовка к практической реализации проекта
Рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560. Процесс создания будет состоять из нескольких этапов:
- подготовка инструментов и материалов;
- изготовление корпуса с колесами и отделом под мусор, пылесборника и турбины;
- монтаж датчиков и микроконтроллера, моторов с редукторами, аккумулятора, щеток;
- выполнение электрических подключений;
- введение программы в Arduino, определение согласованности датчиков;
- проверка работоспособности робота-пылесоса и его способности заряжаться самостоятельно.
Идея реализуется с помощью следующих материалов и инструментов:
- контроллер Arduino – 1 шт, с драйверами;
- лист фанеры (либо плотный картон) – 1 м.кв;
- колеса – 3 шт;
- провод сечением не более 0,75 мм.кв (подойдет витая пара) – около 2 м;
- блок питания – 4 аккумулятора по 18 V, индикатор заряда к ним, зарядное устройство;
- инфракрасные датчики – 4 шт, контактные – 2 шт;
- электродвигатели: для турбины – 1 шт, вращающий щетку – 1 шт, 2 мотора с редуктором обеспечивают передвижение;
- поливинилхлоридный корпус – 1 шт;
- клей – 1 упаковка, саморезы – 10 шт, скотч – 1 шт, набор магнитов;
- набор отверток и сверл, плоскогубцы, нож канцелярский, карандаш, линейка, шуруповерт, электролобзик.
Сборка робота-пылесоса
Подготовив все необходимое можно приступать к сборке. Она заключается в прохождении вышеописанных этапов.
- Создаем корпус цилиндрической формы из картона либо поливинилхлорида: диаметр – 30 см, высота – 9 см, толщина стенок – 0,6 см. Дно лучше вырезать из фанеры.
- Закрепляем на корпусе поливинилхлоридный бампер при помощи скотча, предварительно установив в него датчики инфракрасные и реагирующие на удар.


Важным моментом работы является возвращение бампера в исходное положение после удара о препятствие, то есть достаточная его упругость.
Все детали закрепляются на имеющиеся для этих целей у них разъемы саморезами либо клеем, скотчем. Полученный результат представлен на фотографии:
Как сделать робот-пылесос?
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени. Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно. Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться. У вас всегда есть возможность создать самодельный робот-пылесос. Само собой, сделать такое устройство своими руками и в домашних условиях — это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой. Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.

Робот-пылесос своими руками
Описание самодельного робота пылесоса
Если вы хотите создать механизм, который будет идеально подходить для очистки поверхностей пола в вашем доме, вам следует внимательно соблюдать все правила, которые предписывает схема сборки, представленная в следующем пункте.
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
- Загрузить необходимое программное обеспечение. Если вы хотите сделать свой робот-пылесос максимально похожим на заводские аналоги (исходя из выполняемых функций), вам нужно будет загрузить на микроконтроллер «Ардуино» необходимое программное обеспечение. Это можно сделать при помощи обыкновенного персонального компьютера — достаточно лишь загрузить код на плату «Ардуино».
- Закрепить основные компоненты. Чтобы средства передвижения робота-пылесоса, кулер, микросхемы, аккумуляторы и вся прочая начинка устройства были надежно закреплены, вам потребуется фанерная основа. Она же по совместительству будет днищем вашего пылесоса. Туда же крепятся предварительно склеенные между собой при помощи суперклея турбина и емкость для сбора отходов. Также контейнер должен быть оборудован специальной трубкой, через которую будет выводиться выдуваемый воздух. Она должна быть защищена плотной тканью, которая послужит средством фильтрации. Кулер должен быть последовательно склеен со всеми сервоприводами, после чего посажен на все ту же фанерную площадку, на которой к тому времени уже должны быть монтированы микросхемы и аккумуляторы для подпитки устройства. Колеса для робота пылесоса могут быть куплены на рынке (однако вы можете предпринять попытку сделать их своими руками из консервной банки).

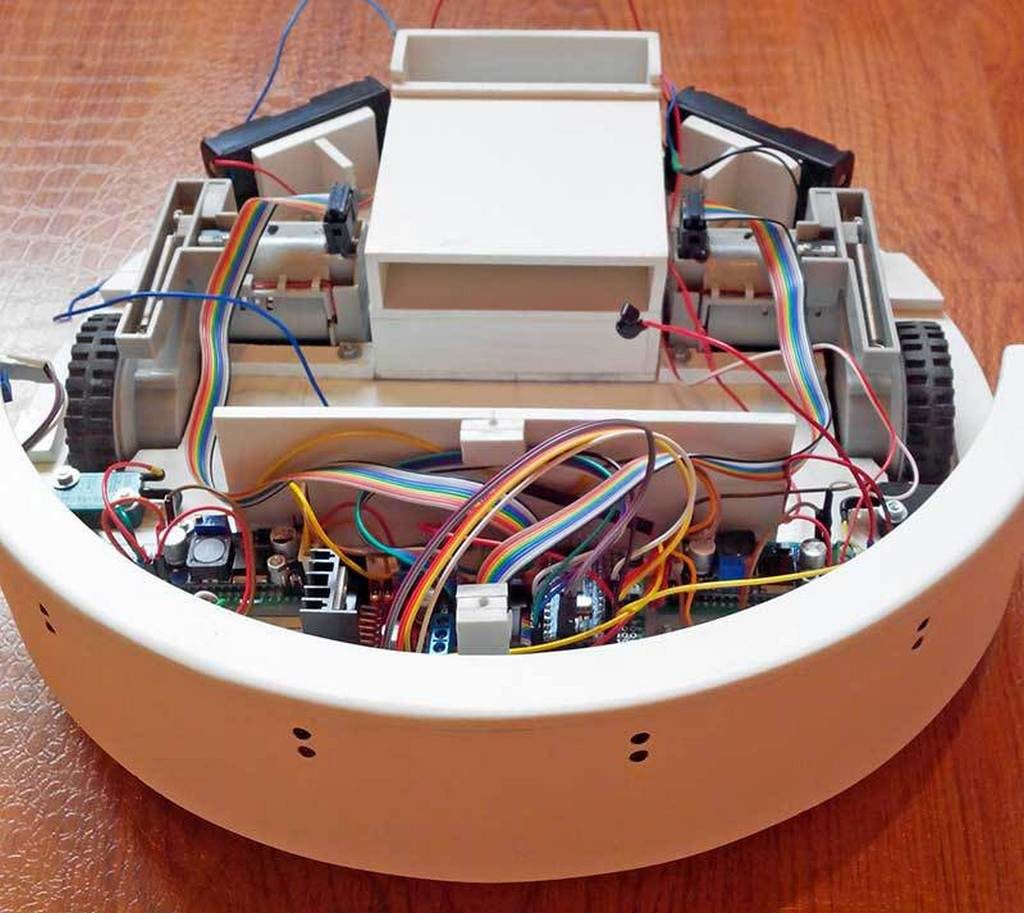
Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Изготовление робота-пылесоса в домашних условиях
Необходимые материалы
Чтобы сделать робот-пылесос своими руками, вам потребуются следующие материалы:
- «Ардуино Про Мини» — главный мозг и информационный центр всей конструкции.
- Драйвер моторов робота-пылесоса серии Л298Н.
- Понижающий преобразователь переменного тока.
- Модуль с мосфетом, посредством которого будет осуществляться контроль над темпом работы передней щетки устройства.
- 4 инфракрасных датчика, которые будут фиксировать наличие препятствий на пути робота пылесоса.
- Пара переключателей, которые будут изменять направление движение устройства при столкновении.
- 3 шарообразных колеса.

Колеса для самодельного робота-пылесоса
- Мотор, обеспечивающий вращение щетки в различных режимах.
- Мотор высокой мощности, обеспечивающий нормальное функционирование турбины.
- 4 литийионных аккумулятора, а также средство контроля над ними.
- Фанерное основание нужного размера.
- Корпус из поливинилхлорида нужного размера.
- 8 пар магнитов для крепления.
- Провода, кабели, переключатели и прочие элементы электрической сети.

Автор, специалист в сфере IT и новых технологий.
Получил высшее образование по специальности Фундаментальная информатика и информационные технологии в Московском государственном университете имени М.В. Ломоносова. После этого стал экспертом в известном интернет-издании. Спустя время, решил попробовать писать статьи самостоятельно. Ведет популярный блог на Ютубе и делится интересной информацией из мира технологий.
«Очумелые ручки» на Robohunter: как собрать робот-пылесос своими руками

Уборка в доме – вещь необходимая, но утомительная, поэтому робот-пылесос стал топом продаж и держится в нём долгое время, облегчив жизнь многим людям.
Правда, незаменимый помощник – дорогое удовольствие. Поэтому находчивые инженеры собирают роботы-пылесосы самостоятельно, причём оснащают их дополнительными функциями и апгрейдят дизайн.
Для тех, кому лень убирать в квартире, но не лень собрать робот-пылесос своими руками, мы подготовили подробную инструкцию для этого.

Необходимые материалы
- гофрированный картон из-под старого пылесоса, ведь он вам больше не понадобится;
- линейка и маркер – семь раз отмерять и прочертить;
- канцелярский нож, ножницы и клей – один раз отрезать и многократно склеить;
- лист фетра – щетина щётки, способной собрать 99,9% пыли и мусора в вашем доме;
- китайская палочка – ось той самой щётки;
- кнопка «вкл./выкл.» из-под настольной лампы – она будет включать устройство (лампу придётся принести в жертву богам чистоты и робототехники);
- мотор-редуктор Arduino с проводами питания – чтобы щётка вращалась самостоятельно, а не с помощью ваших рук;
- аккумулятор или батарейка «Крона», которая придаст сил мотору-редуктору вращать щётку;
- крышечки из-под пластиковых бутылок Coca-Cola/Fanta/Sprite или любого другого любимого напитка (8 шт.) – нет, это не акция, а способ передвижения робота-пылесоса;
- обёрточная бумага, фломастеры, краски и т. д. – для нестандартных дизайнерских решений.
Собираем робот-пылесос. Home Edition
Итак, если все материалы у вас под рукой, пора приступить к сборке робота-пылесоса. Перед началом рекомендуем посмотреть данное видео: в нём наглядно демонстрируется процесс.
А теперь пропишем все этапы для большей ясности.
1. Берём картон и чертим линии изгиба и прорезки согласно размерам, указанным в видеоролике.
2. Сгибаем и режем. Поздравляем – основа робота-пылесоса готова!
3. Берём лист фетра и нарезаем короткими полосками. Нужно постараться сделать их одинакового размера. Собираем их в кучу и откладываем в сторону, но недалеко.
4. Срезаем острый край китайской палочки, тем самым превращаем её в обычную палочку. Точнее, в ось вращения щётки пылесоса.
5. Возвращаемся к куче нарезанных кусочков фетра и аккуратно наклеиваем их по одной к полученной оси.
6. Делаем неглубокое отверстие в одном конце оси.
7. Берём мотор-редуктор, смазываем остриё клеем и вставляем его в проделанное отверстие в бывшей китайской палочке.
8. Поздравляем ещё раз – щётка готова! Аккуратно покрываем клеем микросхему и прикрепляем её к картонной основе.
9. С помощью на всякий случай приготовленной витой пары соединяем провода питания мотора с кнопкой включения и батарейкой. Кладём это в специальный отсек, как показано на видео.
Итак, мы можем поздравить вас в третий раз, так как робот-пылесос фактически готов! Осталось приделать ему колёсики и украсить по своему желанию.
Для колёсиков понадобятся крышки из-под напитков. Сделать из них колёса очень просто: две крышки – одно колесо. Просто склеиваем их вместе и получаем вращающийся элемент. В центре крышек-колёс нужно сделать отверстие и продеть туда заготовленные гвоздики, а затем прикрепить их к конструкции. Этот этап также показан на видео.
Осталось украсить вашего помощника. Здесь вместо инструкции вы получите от нас лишь напутственное слово: просто дайте полёт вашей фантазии! Робот в стиле hi-tech, с логотипом Samsung или со щенячьими глазами? Отлично! Ведь это ваш персональный помощник для уборки дома!
P. S. Мы не уверены, что после прочтения статьи вы таки соберете свой робот-пылесос. Но мы надеемся, что вы получили массу позитивных эмоций. Однако если задаться целью, у вас непременно получится сконструировать реального сверхмощного уничтожителя любого вида грязи – ведь модель из видео действительно работает.
Робот пылесос своими руками

Уборка дело хлопотное и иногда может занять очень много времени, но каждому хочется, чтобы его квартира или дом, был чистым ухоженным и опрятным. Часто бывают ситуации, когда только приберёшь во всех комнатах, пропылесосишь, положишь всё на свои места, но потом через пару часов на полу появляются первые крошки, пыль и прочий мусор, и не всегда хочется повторять эту процедуру по новой. Именно для таких случаем миру был представлен робот пылесос.
Робот, полностью в автоматическом режиме, прекрасно справляется с небольшим мусором, который так часто надоедает. Однако стоимость устройства иногда бывает оскорбительно большая, но это совсем не проблема, робот пылесос своими руками, отлично справляет с поставленными задачами.
Основные требования при создании
- Созданный пылесос должен быть цилиндрической формы, и не очень высоким (ему необходимо попадать под тумбочки, столы, прочее).
- Диаметр колес выбирать с учетом возможности саморазворота.
- Колесо ответственное за «подруливание» обходится без мотора.
- Контактный бампер очень важная составляющая, без него не обойтись, также необходимо учитывать, что он должен занимать не менее половины периметра всего робота.
- У робота, идеального сцепления можно достичь если центр тяжести буде совпадать с колёсами.
- Максимальная практичность мусоросборника, он должен вынимать одним движением.
Основные алгоритмы движения:
Робот пылесос своими руками будет выполнять свою работу на отлично, только с правильным алгоритмом движения. Основных алгоритмов (те, которые показали максимальное КПД) всего два: движение по спирали, увеличивающей из центра комнаты до её краёв, либо зигзагообразные движения из одной стороны комнаты в другую.
Идеальная траектория этих движения построена в идеальных условиях, не учитывая препятствия. Следовательно, что для каждого помещения следует выбирать один из дух представленных вариантов движения.
Робот пылесос своими руками — качество уборки
Робот сделанный собственными руками, конечно, не сравнится с полноценным пылесосом по качеству уборки, однако, такое устройство прекрасно справляется с мелким и надоедливым мусором, особенно если дополнительно оборудовать пылесос щетками и специальными насадками, которые смогу всасывать грязь из углов и других труднодоступных мест.
Мощность такого агрегата
Робот настраивается самостоятельно, скорость и мощность двигателя зависит от вас. Оптимальная скорость такого агрегата находится в пределах 25-30 см/сек, она не слишком высокая, но и не медленная для сбора мусора и батареи хватает на большую площадь работы.
Для работы лучше всего использовать шаговые двигатели, они не будут «забирать» лишнюю мощность у двигателей и заряд у батареи, с такими двигателями передача вращательного момента может быть прямая или через специальные ремни.
Датчики
Любой робот пылесос оборудован разными датчиками, также не отходит от этих догм. На таком устройстве обязательно должен быть инфракрасный датчик, он не даст роботу поцарапать стены или упасть с лестницы, даже если они по какой-то причине не сработают, то всегда есть датчики на бампере, останавливающие устройство за несколько сантиметров от преграды. Далее датчики прекращения работы, устанавливаются они на колёса, так при подъёме робот от отключится автоматически. Более сложных моделях можно использовать датчики возврата на базу, для подзарядки батареи.
