
Интересный роботманипулятор на Arduino
Интересный робот-манипулятор на Arduino
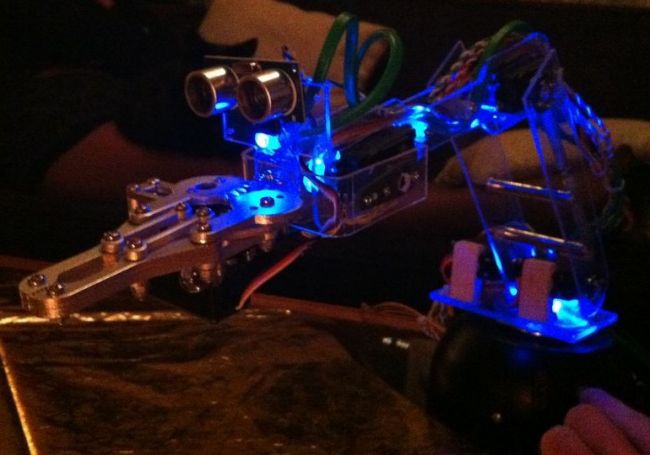
Речь пойдет о роботе-манипуляторе, на котором используется дальномер. Еще робот имеет подсветку. Всего робот работает на 6-ти серводвигателях. Для создания механической части использовался акрил толщиной два миллиметра. Для изготовления штатива было взято основание от диско-шара, при этом один мотор строен прямо в него.
Робот работает на плате Arduino. В качестве источника питания используется компьютерный блок.



Шаг первый. Собираем механическую часть робота
Механическая часть собирается очень просто. Два куска акрила нужно соединить с помощью серводвигателя. Другие два звена соединяются аналогичным образом. Что касается схвата, то его лучше всего купить через интернет. Все элементы крепятся с помощью винтов.
Длина первой части составляет порядка 19 см, а второй примерно 17.5 см. Переднее звено имеет длину 5.5 см. Что касается остальных элементов, то их размеры выбираются на личное усмотрение.
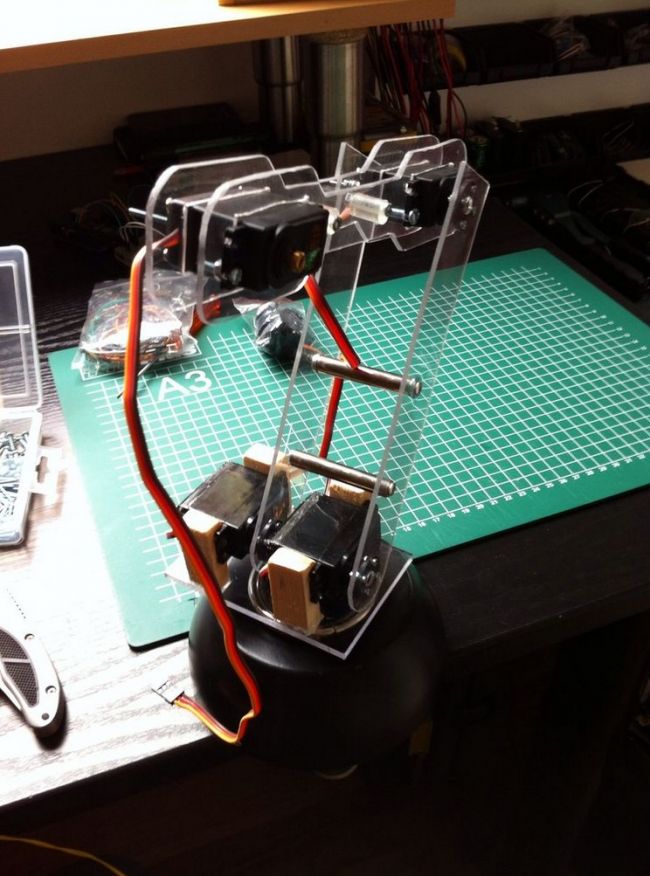
Угол поворота в основании механической руки должен составлять 180 градусов, поэтому снизу нужно установить серводвигатель. В нашем случае его нужно установить в диско-шар. Робот же устанавливается уже на серводвигатель.
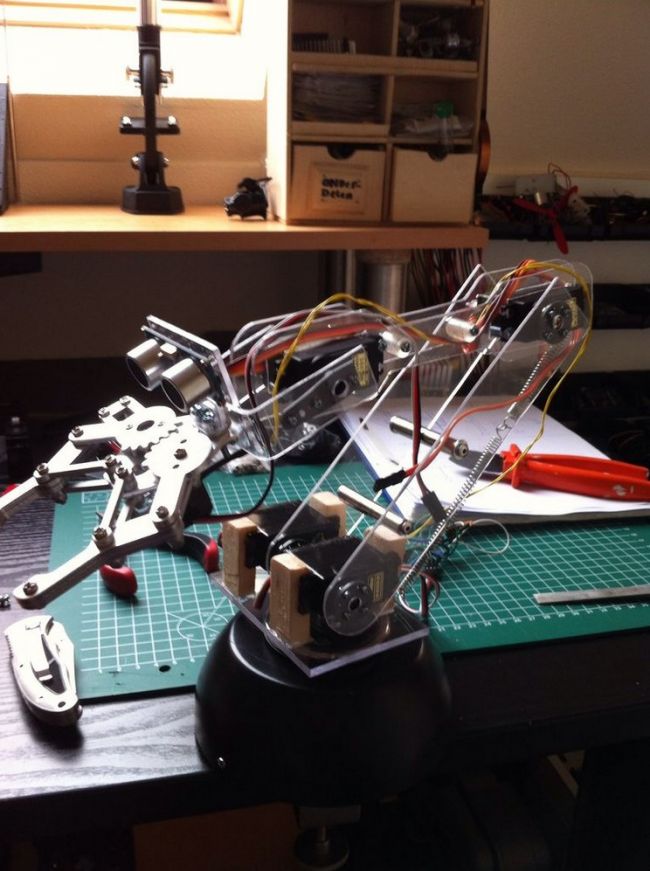
Для установки ультразвукового датчика понадобится кусок акрила толщиной 2 см.
Чтобы установить схват будет нужно несколько винтов и серводвигатель. Нужно взять качалку от серводвигателя и укорачивать ее до тех пор, пока она не подойдет ко схвату. Затем можно закрутить два маленьких винта. После установки серводвигатель нужно повернуть в крайнее левое положение и свести губки захвата.
Теперь серводвигатель крепится на 4 болта, при этом важно следить, чтобы он находился в крайнем левом положении, а губы были сведены.
Теперь сервпривод можно подключить к плате и проверить, работает ли схват.




Шаг третий. Подключение электронной части
Основным контроллером для робота является плата Arduino. В качестве источника питания используется компьютерный блок, на его выходах нужно найти напряжение 5 Вольт. Оно должно быть, если замерить мультиметром напряжение на красном и черном проводе. Это напряжение нужно для питания серводвигателей и датчика расстояния. Желтый и черный провод блока выдает уже 12 Вольт, они нужны для работы Arduino.
Для сервомоторов нужно сделать пять коннекторов. К позитивным подключаем 5В, а негативные к земле. Аналогичным образом подключается и датчик расстояния.
Еще на плате имеется светодиодный индикатор питания. Для его подключения используется резистор 100 Ом между +5В и землей.
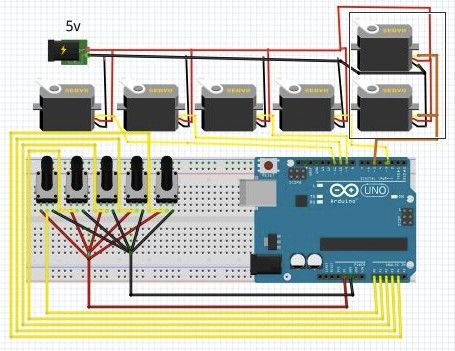
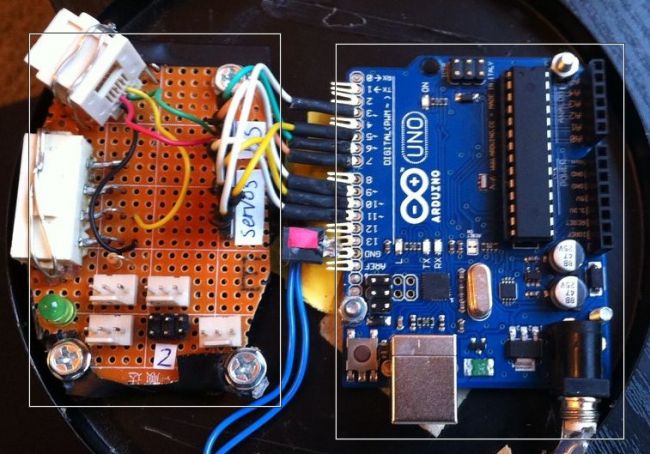
». Что касается ультразвукового датчика расстояния, то его можно подключить к пинам 6 и 7. Светодиод подключается к земле и 13-му пину.
Теперь можно приступать к программированию. Перед тем как подключаться через USB, нужно убедиться, что питание полностью отключено. При тестировании программы питание робота тоже нужно отключать. Если это не сделать, контроллер получить 5В от USB и 12В от блока питания.
На схеме можно увидеть, что для управления серводвигателями были добавлены потенциометры. Они не являются необходимой составляющей робота, но без них предложенный код работать не будет. Потенциометры подключаются к пинам 0,1,2,3 и 4.
На схеме есть резистор R1, его можно заменить потенциометром на 100 кОм. Это позволит регулировать яркость вручную. Что касается резисторов R2, то их номинал 118 Ом.
Вот перечень основных узлов, которые применялись:
— 7 светодиодов;
— R2 — резистор на 118 Ом;
— R1 — резистор на 100 кОм;
— переключатель;
— фоторезистор;
— транзистор bc547.
Шаг четвертый. Программирование и первый запуск робота
Чтобы управлять роботом, было использовано 5 потенциометров. Вполне реально заменить такую схему на один потенциометр и два джойстика. Как подключить потенциометр, было показано в предыдущем шаге. После установки скеча робота можно испытать.
Первые испытания робота показали, что установленные серводвигатели типа futuba s3003 оказались слабыми для робота. Их можно применять лишь для поворота руки или для схвата. Вместо них автор установил двигатели mg995. Идеальным вариантом будут двигатели типа mg946.
Недорогая роборука, программируемая на Ардуино: роботизированный манипулятор своими руками
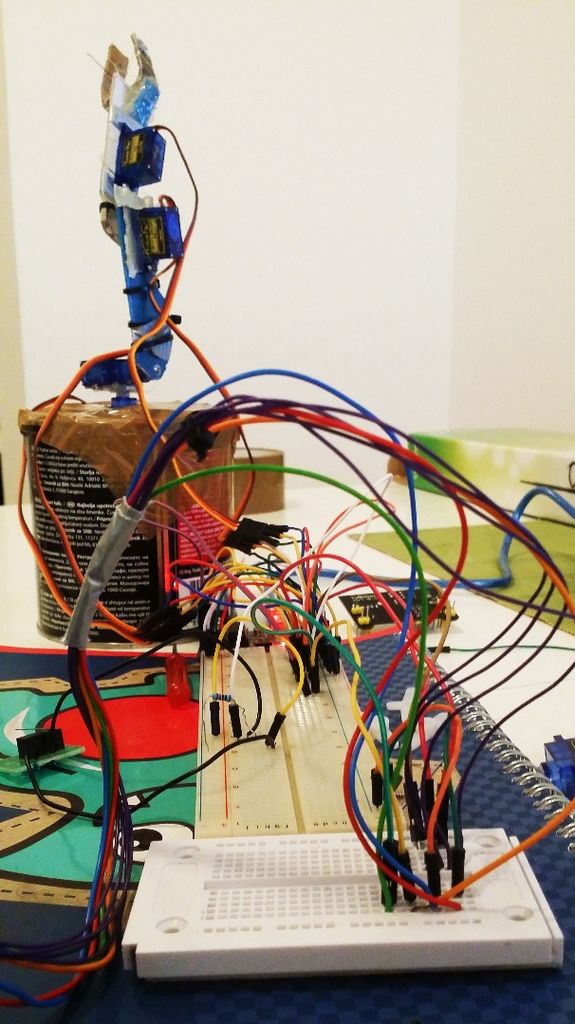
Эта статья — вводное руководство для новичков по созданию роботизированных рук, которые программируются при помощи Ардуино. Концепция состоит в том, что проект роборуки будет недорогим и простым в сборке. Мы соберём несложный прототип с кодом, который можно и нужно оптимизировать, это станет для вас отличным стартом в робототехнике. Робот-манипулятор на Ардуино управляется хакнутым джойстиком и может быть запрограммирован на повторение последовательности действий, которую вы зададите. Если вы не сильны в программировании, то можете заняться проектом в качестве тренировки по сборке «железа», залить в него мой код и получить на его основе базовые знания. Повторюсь, проект достаточно простой.
На видео — демка с моим роботом.
Шаг 1: Список материалов
- Плата Ардуино. Я использовал Уно, но любая из разновидностей одинаково хорошо справится с задачами проекта.
- Сервоприводы, 4 самых дешевых, что вы найдёте.
- Материалы для корпуса на ваш вкус. Подойдёт дерево, пластик, метал, картон. Мой проект собран из старого блокнота.
- Если вы не захотите заморачиваться с печатной платой, то понадобится макетная плата. Подойдёт плата небольшого размера, поищите варианты с джамперами и блоком питания — они бывают достаточно дешевы.
- Что-то для основания руки — я использовал банку от кофе, это не самый лучший вариант, но это всё, что я смог найти в квартире.
- Тонкая нить для механизма руки и иголка для проделывания отверстий.
- Клей и изолента, чтобы скрепить всё воедино. Нет ничего, что нельзя было бы скрепить изолентой и горячим клеем.
- Три резистора на 10K. Если у вас не найдётся резисторов, то в коде на такие случаи есть обходной манёвр, однако лучшим вариантом будет купить резисторы здесь.
Шаг 2: Как всё работает
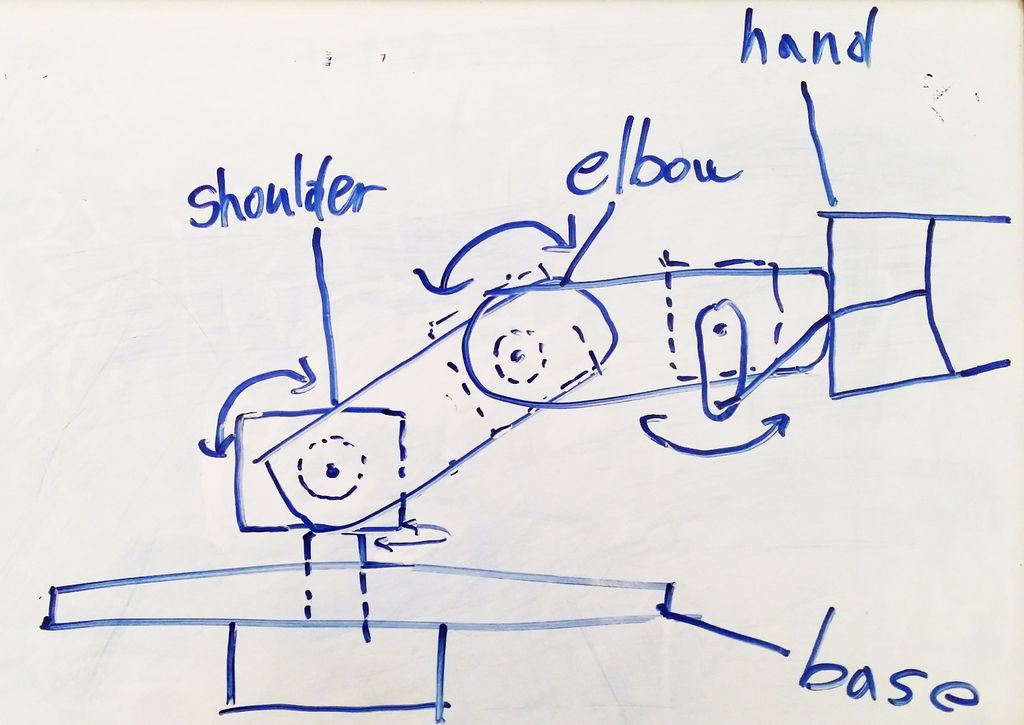
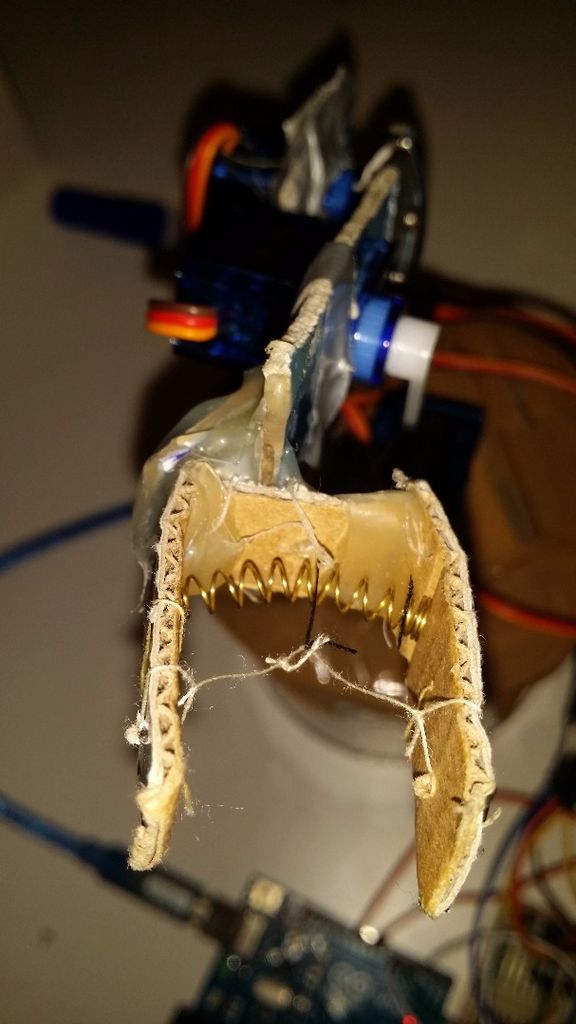
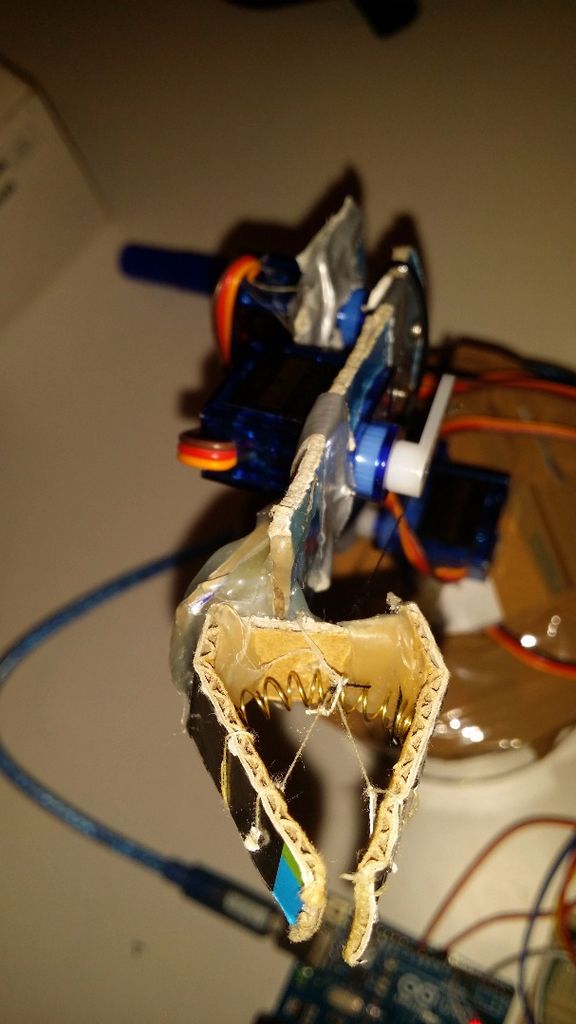



На приложенном рисунке изображен принцип работы руки. Также я объясню всё на словах. Две части руки соединены тонкой нитью. Середина нити соединена с сервоприводом руки. Когда сервопривод тянет нить — рука сжимается. Я оснастил руку пружиной из шариковой ручки, но если у вас есть более гибкий материал, можете использовать его.
Шаг 3: Модифицируем джойстик
Предположив, что вы уже закончили сборку механизма руки, я перейду к части с джойстиком.
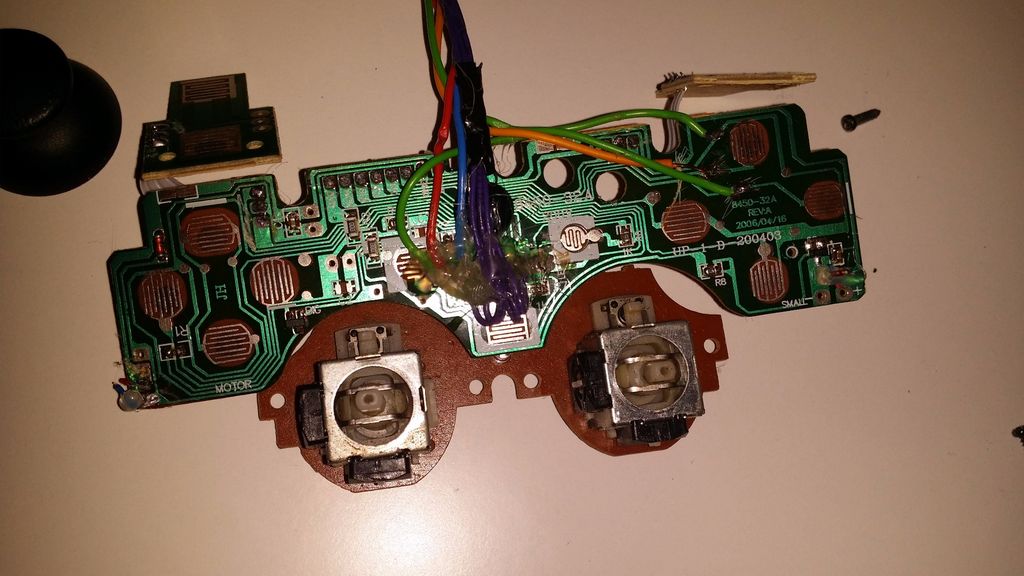
Для проекта использовался старый джойстик, но в принципе подойдёт любой устройство с кнопками. Аналоговые кнопки (грибы) используются для управления сервоприводами, так как по сути это просто потенциометры. Если у вас нет джойстика, то можете использовать три обычных потенциометра, но если вы, как и я, модифицируете старый джойстик своими руками, то вот что вам нужно сделать.
Я подключил потенциометры к макетной плате, у каждого из них есть по три клеммы. Одну из них нужно соединить с GND, вторую с +5V на Ардуино, а среднюю на вход, который мы определим позже. Мы не будем использовать ось Y на левом потенциометре, поэтому нам нужен только потенциометр над джойстиком.
Что касается переключателей, соедините +5V с одним его концом, а провод, который идёт на другой вход Ардуино со вторым концом. Мой джойстик имеет общую для всех переключателей линию на +5V. Я подключил всего 2 кнопки, но затем подключил еще одну, так как в ней появилась необходимость.
Также важно обрезать провода, которые идут к чипу (черный круг на джойстике). Когда вы завершите всё вышеописанное, можно приступить к проводке.
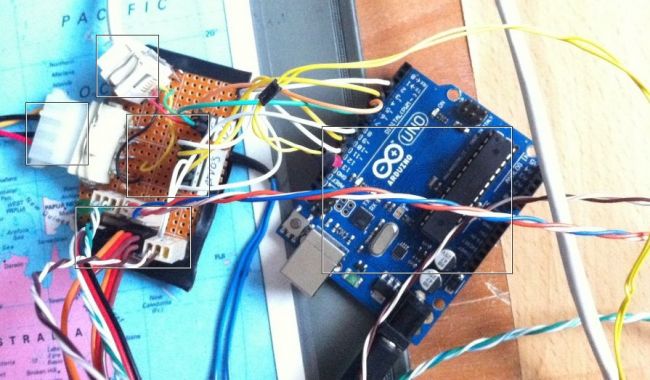
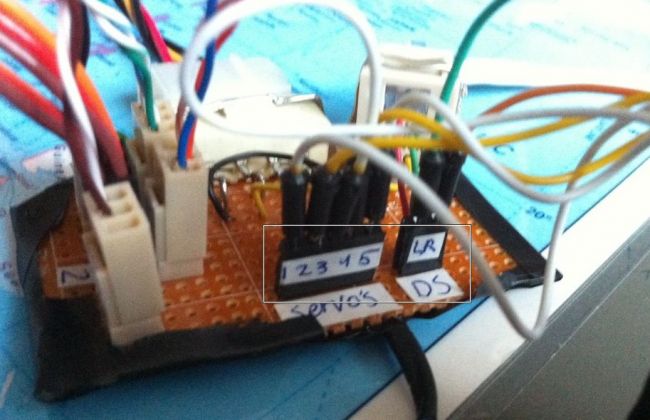
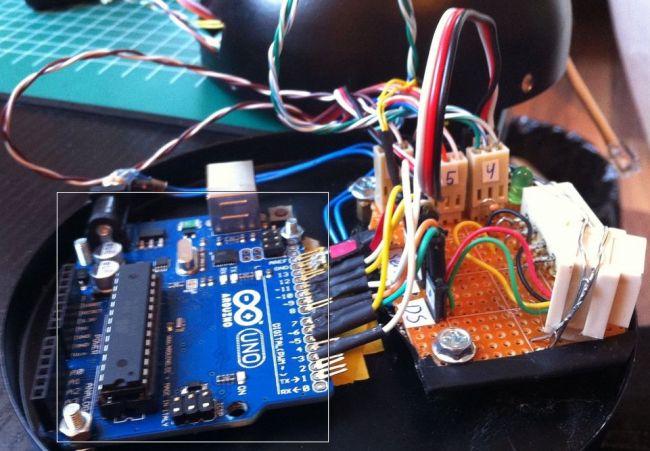
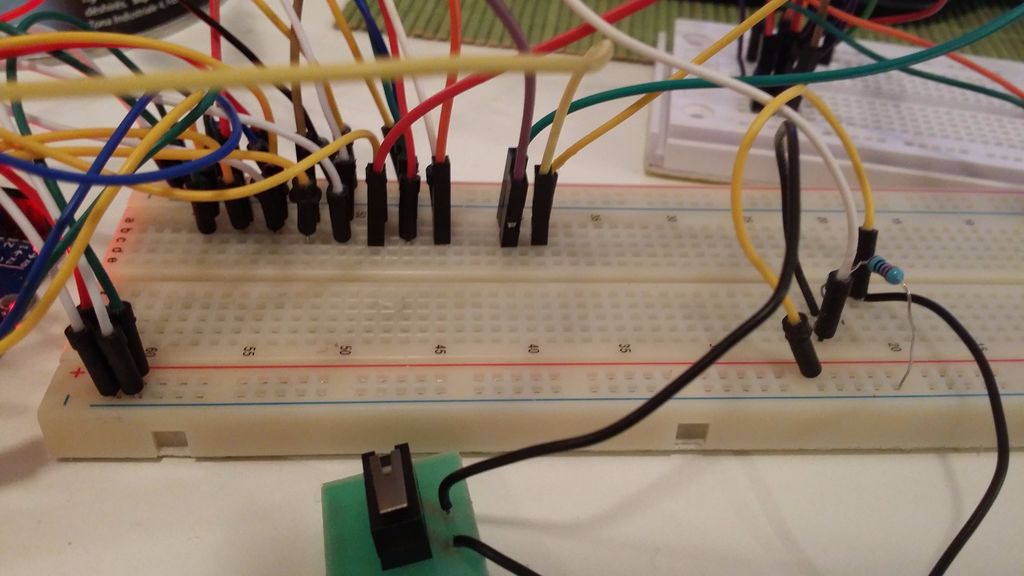
Шаг 4: Электропроводка нашего устройства
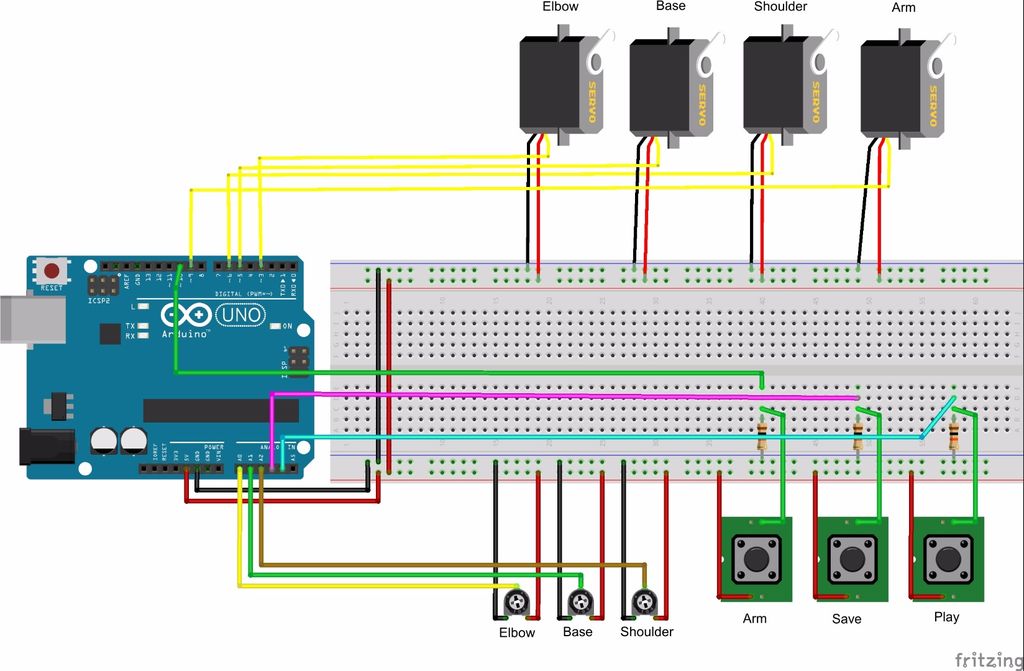
На фотографии изображена электропроводка устройства. Потенциометры — это рычажки на джойстике. Локоть (Elbow) — это правая ось Y, Основа (Base) — это правая ось X, Плечо (Shoulder) — это левая ось X. Если вам захочется поменять направление движения сервоприводов, просто смените положение проводов +5V и GND на соответствующем потенциометре.
Шаг 5: Загрузка кода
На этом этапе нам нужно скачать приложенный код на компьютер, а затем загрузить его на Ардуино.
Заметка: если до этого вы уже загружали код на Ардуино, то просто пропустите этот шаг — вы не узнаете ничего нового.
- Откройте ИДЕ Ардуино и вставьте в него код
- В Tools/Board выберите вашу плату
- В Tools/Serial Port выберите порт, к которому подключена ваша плата. Скорее всего, выбор будет состоят из одного пункта.
- Нажмите кнопку Upload.
Вы можете изменить диапазон работы сервоприводов, в коде я оставил заметки о том, как это осуществить. Скорее всего, код будет работать без проблем, вам нужно будет лишь поменять параметр сервопривода руки. Этот параметр зависит от того, как вы настроили нить, поэтому я рекомендую точно подобрать его.
Если вы не используете резисторы, то вам нужно будет модифицировать код в том месте, где я оставил об этом заметки.
Шаг 6: Запуск проекта
Робот контролируется движениями на джойстике, рука сжимается и разжимается при помощи кнопки для руки. На видео показано, как все работает в реальной жизни.
Вот способ, которым можно запрограммировать руку:
- Откройте Serial Monitor в Ардуино ИДЕ, это позволить проще следить за процессом.
- Сохраните начальную позицию, кликнув Save.
- За один раз двигайте лишь одним сервоприводом, например, Плечо вверх, и жмите save.
- Активируйте руку также только на её шаге, а затем сохраняйте нажатием save. Деактивация также производится на отдельном шаге с последующим нажатием save.
- Когда закончите последовательность команд, нажмите кнопку play, робот перейдёт в начальное положение и затем начнёт двигаться.
- Если вы захотите остановить его — отсоедините кабель или нажмите кнопку reset на плате Ардуино.
Если вы всё сделали правильно, то результат будет похож на этот!
Надеюсь, урок был вам полезен!

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Интересный роботманипулятор на Arduino

Для этого проекта мы решили использовать контроллер Nintendo Nunchuk по ряду причин:
- Они дешевые! Реплики могут иметь низкое качество, но нам не нужен надежный контроллер для этого проекта;
- Их легко найти! В Интернете есть несколько оригинальных и недорогих реплик.
- В нем много датчиков! Каждый контроллер имеет две кнопки (кнопки Z и C), двухосный джойстик (X и Y) и трехосный акселерометр;
- Для него есть библиотека на Arduino. Роберт Эйзеле разработал удивительную и удобную библиотеку для чтения сенсора Nunchuk. Доступный: https://www.xarg.org/2016/12/using-a-wii-nunchuk-with-arduino/
К несчастью, джойстики Nunchuk имеют неудобный разъем, который трудно соединить с другой электроникой. Чтобы подключить его к Arduino, нам пришлось разрезать кабель и разделить провода. Таким образом, он больше не будет работать с Nintendo Wii . /
Сначала нам пришлось отрезать разъем джойстика и снять изоляцию провода. Используя мультиметр и исходя из цвета каждого провода, я определил функцию каждого провода (Vcc, GND, SCL и SDA) на основе схемы разъема, показанного на рисунке. Цвет проводов не имеет определённого стандарта. Мы уже сталкивались со следующими конфигурациями:
Оригинал:
- SDA = зеленый
- SCL = желтый
- 3V3 = красный
- GND = белый
Реплика 1:
- SDA = желтый
- SCL = белый
- 3V3 = зеленый
- GND = красный
Реплика 2:
- SDA = blue
- SCL = white
- 3V3 = pink
- GND = green
Мы припаяли провода к перемычке (папа), чтобы легче было подключиться к плате Arduino. Для этого использовали паяльник и термоусадочную трубку, как показано на рисунках.
Позднее нам сообщили, что есть адаптер Nunchuk, который упрощает подключение к плате ( WiiChuck Nunchuck Adapter shield Module Board For Arduino). Это хороший вариант, если Вы хотите, сэкономить время на пайке и не хотите разрушать оригинальный разъем.
Шаг 10. Схема подключения



Как только Вы соберёте манипулятор, и подготовите разъем Nunchuk, Вы будете готовы что бы собрать электросхему. Мы использовали щит платы управления, который был в комплекте вместе с комплектом манипулятора. Это упрощает подключение компонентов, поскольку в нем уже имеются специальные разъемы для сервомоторов, источника питания и т. д.
Подключите компоненты следующим образом:
Контроллер:
- Контроллер контакт 6 (SCL) => Arduino Mega Контакт 21 (SCL) (на плате)
- Контроллер контакт 1 (SDA) => Arduino Mega Контакт 20 (SDA) (на плате)
- Контроллер контакт 3 (Vcc) => Ardino Mega Контакт 3V3 (на плате)
- Контроллер контакт 4 (Gnd) => Arduino Mega Контакт Gnd (на плате)
Если вы используете Arduino Uno, контакты Nunchuk SCL и SDA должны быть подключены к контактам Arduino следующим образом:
- Контроллер контакт 6 (SCL) => Arduino Uno контакт A5
- Контроллер контакт 1 (SDA) => Arduino Uno контакт A4
- Контроллер контакт 3 (Vcc) => Ardino Uno контакт 3V3
- Контроллер контакт 4 (Gnd) => Arduino Uno контакт Gnd
Сервопривод:
- Контакт Платы управления 11 => Сервопривод № 1
- Контакт Платы управления 12 => Сервопривод №2
- Контакт Платы управления 13 => Сервопривод № 3
- Контакт Платы управления 8 => Сервопривод № 4
- Контакт Платы управления 9 => Сервопривод №5
- Контакт Платы управления 10 => Сервопривод №6
Если вы не используете плату управления, Вы должны использовать следующую конфигурацию контактов:
- Arduino Контакт 11 => Серво #1 (Sgn)
- Arduino Контакт 12 => Серво #2 (Sgn)
- Arduino Контакт 13 => Серво #3 (Sgn)
- Arduino Контакт 8 => Серво #4 (Sgn)
- Arduino Контакт 9 => Серво #5 (Sgn)
- Arduino Контакт 10 => Серво #6 (Sgn)
- Arduino Контакт Gnd => Серво Gnd
- 6В Контакт питания => Серво Vcc
Вам также необходимо подключить внешний источник питания 12 В. Мы предлогаем использовать один блок с выходом более 2A. Сервоприводы потребляют много энергии, и если блок питания недостаточно мощный, сервоприводы будут вибрировать и перегреваться. Они также потеряют свою мощность.
Не подключайте источник питания до тех пор, пока Вы не загрузите код Arduino (см. Дальнейшие шаги). На плате есть кнопка питания. Держите её в выключенном положении.
Подключите USB-кабель к Arduino и перейдите к следующему шагу.
Шаг 11 Настройка Arduino IDE

Теперь, когда оборудование готово, пришло время поработать над кодом Arduino.
- Скачайте и установите новую версиюArduinoIDE
Вы можете найти последнюю версию для Windows, Linux или MAC OSX на веб-сайте Arduino: https://www.arduino.cc/en/main/software
- Добавление библиотек
Для этого проекта я использовал потрясающую библиотеку Nunchuk Arduino Роберта Эйзеля! Подробнее Вы можете узнать на его сайте:
Перейдите в Sketch-> Include Library -> Manage Libraries. на вашей Arduino IDE для добавления библиотеки.
Перейдите в Скетч-> Подключить Библиотеку -> Добавить Библиотеку. на вашей Arduino IDE для добавления библиотеки.
Как работает библиотека?
В библиотеке Nunchuk имеется набор функций для считывания датчиков контроллера:
nunchuk_buttonZ (): возвращает 1, если нажата кнопка Z, или 0, если это не так;
nunchuk_buttonC (): возвращает 1, если нажата кнопка C, или 0, если это не так;
nunchuk_joystickX (): возвращает значение x джойстика (от -127 до 127);
nunchuk_joystickY (): возвращает значение y джойстика (от -127 до 127);
nunchuk_pitch (): возвращает угол контроллера в радианах (от -180º до 180º);
nunchuk_roll (): возвращает угол наклона контроллера в радианах (от -180º до 180º).
Углы возвращаются в радианах. Мы преобразовали эти значения в градусы в коде Arduino.
Шаг 12. Код Arduino






Загрузите скетч файл Arduino.
Подключите USB-кабель к USB-порту вашего компьютера и загрузите код. Загрузка кода занимает время, Вам нужно проявить терпение.
После полной загрузки, отсоедините USB-кабель, подключите источник питания к Arduino и включите кнопку питания. Код начнет работать моментально.
Предупреждение: При запуске кода, манипулятор быстро переместится в исходное положение. Будьте осторожны, чтобы не пораниться или повредить оборудование во время запуска!
Вам, возможно, придется заменить начальный угол каждого серводвигателя в зависимости от того, как Ваши сервоприводы монтируются.
Объяснение кода:
Перед установкой кода импортируте библиотеки, используемые в эскизе (nunchuk.h, wire.h и servo.h).
Далее определяются используемые контакты и объявляются глобальные переменные. Целочисленные переменные angle# (угла) сохраняют начальную позицию для каждого сервопривода. Если Вы хотите, чтобы Ваш робот начал работать в другой позиции, измените значения этих переменных.
Переменные servo # _speed определяют скорость движения каждого сервопривода. Если вы хотите, чтобы определенный сервопривод двигался быстрее, увеличьте его значение. Угол # min и угол # max используются для ограничения максимального и минимального угла для каждого сервопривода. Вы можете установить эти переменные, чтобы избежать коллизий между последовательными суставами робота.
Во время настройки каждый сервопривод подключается к определенному выводу, и его положение запускается.
Здесь также запускается последовательная связь (с последовательным монитором) и связь I2C с Nunchuck.
Основной цикл повторяется снова и снова. Статус Nunchuk читается в каждом цикле. В зависимости от показаний выполняются разные команды.
Джойстик X будет использоваться для перемещения серво #1.
Был использован следующий блок кода. Сначала он проверяет, достаточно ли значение джойстика. Таким образом, шум и небольшие вариации не учитываются. Если значение соответствует требованиям, угол сервомашины будет увеличен / уменьшен с заданной скоростью.
Аналогичный блок используется для джойстика Y. Он используется для изменения угла Серво #3. Серво #2 сохраняется в этом коде.
Вращение захвата задается углы рулона и тангажа контроллера, измеренные его акселерометром. Чтобы облегчить управление рукой, угол захвата обновляется только при нажатии кнопок C или Z.
Когда нажимается только кнопка C, код считывает угол поворота и использует его как заданное значение. Серво #5 вращается до достижения заданного значения. Это скорость пропорциональна ошибке между фактическим и желаемым положением. Аналогичный код используется для сервоуправления №4, который отслеживает угол наклона контроллера.
Захват закрывается всякий раз, когда нажимаются кнопки C и Z. Когда какая-либо из этих кнопок будет не нажата, манипулятор откроет захват.
К концу эскиза есть блок кода. Он отобразит на Serial Monitor фактический угол каждого сервомотора. Может быть полезно выбрать начальный угол каждого двигателя.
Шаг 13. Использование





Загрузите скетч файл Arduino.
Теперь, когда все готово, запустите манипулятор и получайте удовольствие!
Nunchuk используется для управления пятью движениями, показанными на рисунках: вращение вправо / влево, движение вверх / вниз, вращение захвата, захват вверх / вниз и захват / открытие. Вы можете комбинировать эти движения для выполнения различных задач.
Вы можете изменить код для разных движений на основе комбинации кнопок и углов джойстика.
Робот на Ардуино и машинка на Bluetooth своими руками
Робот – машинка на Ардуино становятся одним из самым популярных инженерных проектов в школьной робототехнике. Именно с таких устройств, автономных или управляемых со смартфона и bluetooth, начинается путь в робототехнику “после Lego”. К счастью, сегодня можно без труда купить все необходимые компоненты и достаточно быстро создать своего первого робота для езды по линии или объезда препятствий. В этой статье вы найдете подробную видео инструкцию как сделать продвинутый автомобиль Arduino Car своими руками, с питанием, датчиками линии, расстояния и управлении через bluetooth.
Робот на ардуино своими руками
В отличие от других проектов, создание робота – автомобиля (Arduino Car) требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию машинок без получения базовых навыков работы с платформой Arduino. В любом случае, вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление. Все это потребует определенного терпения.
 Робот машина на Ардуино
Робот машина на Ардуино
Вот список ключевых компонентов, которые обязательно встретятся в проекте.
Контроллер Ардуино
Куда уж без него, если мы говорим о проектах на этой платформе. Как правило, роботы машины делают на базе плат Arduino Uno и Nano. Mega будут слишком большие, Pro Mini сложнее подключать к компьютеру и соединять с остальными компонентами, а Leonardo требуют дополнительных навыков в программировании, они дороже и их основное преимущество (тесная интеграция с компьютером в качестве периферийного устройства) в данном случае не слишком востребована.
Есть еще вариант использования плат ESP8266 или ESP32, тогда в проекте появляется возможность управления машиной через WiFi. Но и сами платы и их программирование требует определенных навыков, в этой статье мы будем говорить преимущественно об Uno или Nano.
Конструкция, шасси и двигатели робота на Ардуино
Для того, чтобы что-то поехало или стало перемещаться, надо снабдить “это” колесами, гусеницами или манипуляторами-ногами. Вот тут выбор совершенно не ограничен, можно использовать совершенно любые комбинации и сочетания платформ. Как правило, в качестве начального варианта берутся уже готовые наборы платформ с Алиэкспресс.
 Двигатель, шасси и колеса машинки на ардуино
Двигатель, шасси и колеса машинки на ардуино
Если работать со стандартными наборами вам не интересно, можно создать платформу своими руками. Например, разобрать игрушечные радиоуправляемые машинки или любые двигатели на 5-12 вольт, с редукторами или без. Колеса можно создать и самим, что тоже является интересной задачей.
Драйвер двигателей
Ардуино – достаточно ранимое устройство, не терпящее больших нагрузок по току. Соединяя его с “брутальными” мощными двигателями, не избежать беды. Поэтому для нормальной совместной работы нам нужно будет включить в схему робота компонент, отвечающий за управление двигателями – подающий и отключающий ток на их обмотки. Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Красивый корпус
Как правило, вся конструкция автомобиля строится вокруг его шасси. Если посмотреть примеры готовых проектов, то они часто выглядят как “провода на колесиках” – внешний вид их изобилует пучками соединительных проводов, ведущих от восседающего на троне контроллера Ардуино к драйверам, моторам и датчикам. Между тем, красивый и функциональный корпус не только вызывает правильные эстетические чувства и помогает выделить вашу модель от остальных. Хороший корпус может превратить игрушку в реальное устройство, помогает привить навыки конструирования и промышленного дизайна, что важно для инженеров любого возраста.
Питание робота
Обеспечение правильной схемы питания – это то, что очень часто оказывается на последнем месте в списке приоритетов начинающих ардуинщиков. Между тем, именно ошибки в схеме электропитания становятся основными причинами проблем, возникающих в процессе работы умных устройств на Ардуино. Создавая ардуино-машинку нужно предусмотреть питание контроллера, двигателей, драйвера и датчиков. У всех них есть свои ограничения и особенности работы, требуется создать оптимальное по весу и сложности решение, позволяющее учесть все эти ограничения.
 Питание робота на Ардуино
Питание робота на Ардуино
Создавая по-настоящему автономное устройство робота, нужно побеспокоиться и о времени его работы, и о возможности быстрой подзарядки или смены батареек. Как правило, выбираются решения из следующих вариантов:
- Обычные батарейки AA. Тут нужно понимать, что платы Arduino Uno, Nano и большинство двигателей, используемых в Ардуино-робототехнике, требуют напряжения в диапазоне 6-9 вольт. Поэтому придется собрать вместе последовательно не менее 4 батареек на 1,5 В, причем сами батарейки должны быть хорошего качества и обеспечивать работу с достаточно большим током. Например, большинство солевых батареек этим критериям не удовлетворяют. Батарейки AAA при создании ардуино-машинок практически не используются из-за своей пониженной емкости (хотя могут использоваться в миниатюрных моделях, где размер имеет первостепенное значение).
- Аккумулятор AA. Здесь возникает еще большее ограничение по напряжению и току. Большинство аккумуляторов выдают напряжение 1,2 вольт, поэтому их требуется больше для “собирания” нужных нам 6-9 вольт. Несомненным плюсом является возможность перезарядки.
- Литиевые аккумуляторы 18650. Это уже “серьезная артиллерия”, позволяющая получить большое время автономной работы, возможность подзарядки и приемлемые характеристики по току и напряжению. Рабочее напряжение для таких элементов питания – 3,7 В, что позволяет собирать готовую схему питания всего из двух элементов.
- Другие источники питания. Сюда можно включить как более мощные и габаритные никель-металлгидридные, кадмиевые аккумуляторы, так и многочисленные литий-ионные “плоские” варианты, используемые в дронах, смартфонах или другой портативной цифровой технике.
Каким бы ни был источник питания, нужно обеспечить его надежное крепление, удобное расположение, защиту от воздействия недружелюбной окружающей среды. Если вы подключаете к одному источнику и контролер, и двигатели, и датчики, то нужно позаботиться о правильной схеме, включающей, например, надежную связь “по земле” всех устройств.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
