Полезные ресурсы для создания робота своими руками
Как построить робота – конструкция и схема
Обзор
Это первая часть в серии статей о моем опыте создания робота, который может делать разные вещи. Я думал, что было бы замечательно создать робота, которого легко было бы собрать лишь с одним паяльником, и комплектующие к нему были бы доступны. Я составил следующий список требований к этому роботу:
- Многие наборы стоят дорого, поэтому он должен быть относительно недорог.
- Он должен быть простым в сборке, не требуя специального оборудования.
- Он должен быть простым в программировании, не требуя сложных IDE и программатора.
- Он должен быть мощным для расширяемости.
- Он должен запускаться от простого источника питания.
- Он должен быть способен следовать за линией или за стеной и избегать препятствий.
В этой статье я расскажу, как я решил выполнить эти требования.
Полный список компонентов
Первый шаг в любом проекте – выяснить, какие необходимы комплектующие. Чтобы быть полезным, роботу нужно несколько ключевых вещей: способ двигаться, думать и взаимодействовать с окружением. Чтобы снизить стоимость, мне нужно обойтись двумя колесами. Этот означает, что мне нужно управлять двумя отдельными двигателями, которые могут работать независимо друг от друга.
Мне также нужна шаровая опора, на которую робот может опираться, чтобы скользить. У этого решения есть недостаток: робот не может перемещаться ни по каким поверхностям, кроме гладких полов. Я хочу, чтобы мозги были построены на базе какой-либо известной микроконтроллерной платформы. Так ему не понадобится программатор или руководство по использованию средств разработки.
У робота должны быть датчики, которые позволяют ему знать о линиях, стенах и препятствиях. Я также хочу свести к минимуму количество разных мест для покупок, чтобы снизить итоговую стоимость доставки. Наконец, компоненты должны быть небольшими, потому что я хочу спроектировать плату для недорогого производства и оставаться в пределах бесплатной версии Eagle CAD.
Основы схемотехники
1. Можно разветвлять проводники, но нельзя соединять напрямую выходы или входы (проводники, по которым могут проходить сигналы с разными значениями), иначе возникнет короткое замыкание.
2. Что такое делитель напряжения.
3. Как подключить датчик.
4. Электронный ключ. Что такое усилитель и как заставить вращаться мотор.
Питание: драйвер двигателя, батарея
Я нашел пару веб-сайтов, которые предлагают различные двигатели и компоненты для роботов, но я остановился на Polulu из-за их цен и наличия всего необходимого. Продукты Tamiya выглядели неплохо. Комплект 70168 Double Gearbox Kit поставляется с шестеренками, двигателями и валами, что значительно упрощает механику.
И он очень дешев! В нормальном режиме двигатели работают от 3В, но могут работать и от большего напряжения за счет сокращения срока службы. Поддерживается несколько передаточных чисел, поэтому я могу точно настроить скорость робота. Я остановился на самых дешевых колесах, которые подойдут к валу из этого комплекта, Tamiya 70101 Truck Tire Set.
 Мозг робота: Teensy
Мозг робота: Teensy
Драйвер двигателя должен иметь возможность управлять трехвольтовыми двигателями, выбранными ранее. Я также хотел, чтобы он был масштабируемым на случай, если я захочу в будущем заменить двигатели. Я нашел драйвер всё в том же магазине. Он может работать с напряжениями 0–11 В и обеспечивать достаточно большие токи для двигателей, которые я захотел бы поставить в будущем.
По поводу аккумулятора, я бы предпочел, чтобы робот работал на чем угодно. Teensy работает с напряжениями до 5,5 В, что означает, что можно использовать литиевый аккумулятор. Однако для лития требуется зарядное устройство, а я не хочу увеличивать расходы. Использование двух обычных батарей AA обеспечивает довольно много энергии без необходимости зарядного устройства.
Недостатком является то, что они обеспечивают только
3 В и большие по размеру. Входное напряжение 3 В неже линейного стабилизатора Teensy на 3,3 В. Робот всё равно будет работать, потому что все компоненты, выбранные для Teensy, могут работать на более низком напряжении. Тем не менее, встроенный на Teensy стабилизатор напряжения стабилизировать не будет.
Простой бумажный робот
Схемы простых роботов на нескольких транзисторах, реализующие следование за светом.
Чтобы создать поделку робот из бумаги необходимо запастись следующими материалами:
Помимо того может понадобится также картон, иголка или шило, фломастеры и резинки для соединения частей.
На схемах можно увидеть несколько типов линий. Разрез ножницами предусмотрен по сплошной линии. Пунктирные очертания предназначены для сгибания бумаги.
При необходимости сделать отверстия, используете иглу или канцелярский нож до вырезания макета. Для наглядного представления готовой игрушки согните все части по пунктирным линиям, как видно на фото поделки робот.
Поделку робот из картона делают так:
- сделать распечатку схемы на картоне;
- ножницами вырезать все части схемы, действуя по инструкции;
- вырезанные детали сгибаем по пунктирным линиям;
- соединяем необходимые части с помощью клея;
- делаем сбор всех деталей робота в одну бумажную конструкцию, следуя инструкции.
Мозги: микроконтроллер
Существует несколько различных микроконтроллерных платформ, которые довольно популярны. Основываясь на популярности, очевидным выбором является какая-либо Arduino. Другие варианты: Teensy, Launchpad и Raspberry Pi. Pi слишком большой и прожорливый, Launchpad тоже слишком большой. В прошлом я использовал Teensy, и это был хороший опыт.

Teensy немного дороже, чем Arduino Mini, но предлагает гораздо более мощную платформу. Последняя плата Teensy снабжена Cortex M4, который обладает достаточной мощностью для простого робота. Бонусом к Teensy является встроенный стабилизатор на 500 мА, который может быть использован для питания всех датчиков.
Взаимодействие: датчики
Для следования за линией и следования за стенами требуются разные датчики. Датчики для следования за линией – это обычно рефлектометры, которые изменяют выдаваемое напряжение в зависимости от того, сколько света отражается от земли. Это делается с помощью светодиода и фотодиода или датчика освещенности.
Детекторы стен и препятствий – это обычно датчики расстояния. Оба типа этих датчиков были доступны в удобных DIP корпусах в том же магазине, что и двигатели, что позволило мне сэкономить на доставке и легко их припаивать. По поводу датчика линии, я нашел датчик с тремя сенсорами, которые позволяют роботу в любое время центрироваться относительно линии.
Роботы своими руками или Как сделать робота
У начинающего робототехника всегда возникает два вопроса: «как сделать робота» и «из чего сделать робота». На эти два вопроса пытается ответить этот сайт, посвященный BEAM-роботам, алгебре логики и логическим схемам роботов.

Робототехника
для начинающих
Разработка схем роботов
Математические методы
BEAM (произносится бим) является отличной школой робототехники и электроники, так как позволяет вести освоение шаг за шагом, от простого к сложному. От создания роботов с простейшими рефлексами до систем, управляемых нейронными сетями.
BEAM-роботы в отличие от обычных роботов, построенных на основе последовательных вычислений с применением микропроцессоров, используют нейросетевые принципы параллельной обработки информации, поступающей от датчиков.
При создании BEAM-существ широко применяются аналоговые технологии, позволяющие реализовать разновидности нечеткой логики, и нейронная поведенчески-ориентированная архитектура систем управления, основанная на стимул-ответных реакциях.
Кроме того, одним из основных подходов в BEAM-робототехнике является принцип разумного минимализма, не позволяющий усложнять конструкции без особой надобности.
РОБОТЫ и БИОЛОГИЯ
BEAM-роботы являются одними из, пожалуй, самых интересных робототехнических созданий. Один из основных принципов дизайна BEAM-робота — следование природе живых существ. Таким образом, и сам BEAM-робот является, в некотором роде, почти живым существом.
Именно следование биологическим принципам при проектировании роботов наделяет эти биоморфные создания неподражаемым поведением, которое очень сложно достичь при использовании полностью цифровых устройств (процессоров и микроконтроллеров). BEAM-робот по большей части — это аналоговое устройство, использующее широкие возможности аналогового подхода.
BEAM-технология позволяет создавать простых и шустрых роботов с уникальным поведением из доступных и распространенных компонентов без необходимости сложного программирования.
Конструкция робота, выполненная с учетом анатомии насекомых, позволяет даже очень простым роботам демонстрировать достаточно интересное поведение. Насекомые выбраны в качестве одной из основных моделей в силу того, что их нервная система является одной из самых простых и эффективных относительно других живых существ. Сложное поведение может стать результатом работы всего нескольких нейронов.
Поведение роботов должно быть приближено к поведению живых организмов, поэтому за основу берутся аналоговые принципы. Конечно же, использование микроконтроллеров не запрещается, но базовые инстинкты робота должны быть реализованы на основе независимых нейронных цепей.
В основе нижнего слоя архитектуры BEAM-роботов лежат конструкции, обеспечивающие реализацию поведения типа «стимул-реакция». Такое поведение обычно реализуется с помощью низкоуровневых «нервных сетей».
Нейронная поведенчески-ориентированная архитектура — основа всего BEAM-роботостроения.
Использование аналоговых принципов позволяет реализовать системы с нечеткой логикой.
Кроме того, поведенчески-ориентированная архитектура доктора Тилдена может быть сведена до частного случая предикативной архитектуры Родни Брукса, как нейронного процесса, использующего метод предикативной (условной) реакции на стимул.
BEAM-роботы: от простого к сложному
Базовым принципом ВЕАМ-философии является эволюция роботов: развитие снизу вверх от простых конструкций к сложным системам.
Простота и красота BEAM-роботов привлекает к этому хобби людей всех возрастов и уровней образования. Уже с первых шагов даже начинающий способен создать работоспособные конструкции не учась программировать и не углубляясь в длительное освоение микропроцессорной техники. Если у вас хватает умения для того, чтобы выпрямить скрепку, то значит у вас хватит умения построить и BEAM-робота.
BEAM является лучшим путем изучения робототехники, логических схем и электроники для начинающих. А безграничные потенциалы, заложенные в BEAM-технологии, делают ее отличным хобби как для молодых конструкторов так и для зрелых людей, увлекающихся роботами. В отличие от большинства, основанных на процессорах роботов, BEAM-роботы дешевы, просты и могут быть построены любителями всего за несколько часов.
КАК СДЕЛАТЬ РОБОТА
РОБОТОТЕХНИКА ДЛЯ НАЧИНАЮЩИХ
Стоит добавить, что BEAM-технология — лучший путь для знакомства с основами электроники, а сами BEAM-роботы являются одними из непременных участников сайтов, рассказывающих про робототехнику для начинающих.
Для того, чтобы сделать своего первого робота необходимо познакомиться всего с несколькими электронными деталями. Список этих электронных деталей для создания робота очень небольшой.
Вот собственно и все, что понадобится для создания BEAM-робота, наделенного фототропным поведением. Ваш первый робот будет реагировать на свет. Более того, следуя заложенному в него фототропизму, он будет следовать за светом.
Хотя робот очень прост, но у него будет широкий потенциал для развития. Добавив в него пару светодиодов и резисторов, Вы получите робота, способного избегать препятствия. Ваш робот уже не будет глупо упираться в стенку, а сможет миновать неожиданную преграду.
Сайт находится в разработке, поэтому, пожалуйста, проявите снисходительность к тому, что материалов, пока мало.
Полезные ресурсы для создания робота своими руками
Нас часто спрашивают, как самостоятельно создать робота? И сложно ли это?
– Нет, не сложно, если у вас есть опыт и наработки. Но если вы начинающий алготрейдер, то перед вами встанет сразу несколько непростых задач.
Для начала вы должны определиться какую именно торговую стратегию будете автоматизировать.
Затем нужно четко формализовать эту стратегию: описать строгими условиями все входы и выходы из позиции.
Теперь нужно определиться под какой торговый терминал будем разрабатывать робота.
Изучаем функции алготрейдинга (выставление и снятие заявок, получение текущих данных из терминала, механизм взаимодействия скрипта и терминала).
Изучаем как устроена структура данных (таблиц) на сервере Мосбиржи, чтобы знать откуда что брать.
Важно иметь хотя бы базовое понимание о программировании: что такое переменные, условия, операции сравнения, циклы, функции, события, работа с файлами и т.п.
После этого можно смело браться за создание своего робота. Описываем логику на языке программирования и запускаем робота на демо-счете, для отладки. Исправляем баги или ошибки в логике алгоритма, если такие обнаружатся.
Для удобства все настройки выносим в отдельный файл, чтобы не приходилось каждый раз изменять исходный код робота при подстройке стратегии.
Не забываем сделать удобный интерфейс, чтобы сразу видеть текущее состояние системы (заявки, позиция, стоп, тейк и т.п.).
Пример можно увидеть здесь: 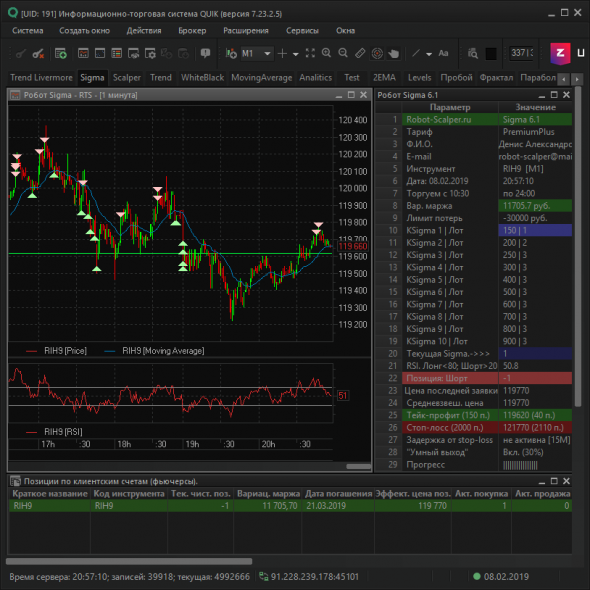
Тестируем. Анализируем сделки. Проверяем насколько корректно отрабатывает робот.
Логирование событий позволяет отследить в прошедшем времени все намерения робота и все свершившиеся события: выставление и снятие заявок, полное или частичное исполнение заявок, изменение текущей позиции и т.п.
Если торговый терминал позволяет, то можно провести бэк-тестирование (тестирование на исторических данных). Либо даже форвардное тестирование. Об этом подробно написано здесь https://smart-lab.ru/blog/503560.php
А также можно выполнить оптимизацию значений параметров стратегии.
Здесь важно искать не просто конкретные значения, при которых система покажет максимальную прибыль и минимальный убыток (в следующем месяце это может не повториться), а нужно найти диапазон значений, в которых стратегия показывает прибыль. Желательно брать значения из середины диапазона. Мы не можем наверняка знать насколько хорошо они подойдут в следующем торговом периоде. Но мы ожидаем, что доходность будет положительна.
Какие гарантии того что робот будет стабильно зарабатывать деньги?
– Никаких! Когда разрабатываешь робота, то не знаешь заранее будет ли данная стратегия прибыльная или нет. Только время покажет. Это как в любом другом бизнесе. Например, вы купили помидоры и стали их продавать. Какие гарантии? – Никаких! Если вы плохой бизнесмен, то ничего не продадите и помидоры просто протухнут. А если хороший бизнесмен, то будете в прибыли.
Так же и в трейдинге. Нельзя ставить сильно высокую цену на продажу, так как никто у вас не купит. И нельзя ставить сильно низкую цену на покупку, так как никто по такой цене вам не продаст.
Слишком близкие цены покупки и продажи тоже не будут вам выгодны, так как комиссия будет съедать большую часть прибыли. Во всём нужна золотая середина! Это понимание приходит с опытом.
По поводу прибыльных стратегий. Как сразу найти прибыльную? – Никак. Нужно запрограммировать и протестировать десятки стратегий. Нужно анализировать сделки. Потом придет понимание того что работает на рынке, а что нет. Непроизвольно вы начнете делить стратегии на группы с общими признаками. После этого любую новую стратегию, еще до тестов, вы сразу будете относить к той или иной группе. И будете понимать примерные возможности по риску и доходности.
Это то, что касается разработки торговых стратегий и роботов.
Еще люди спрашивают, сложно ли развивать ваш проект «Робот Скальпер» и осуществлять техподдержку?
— Да. Сложно. Приходится отвечать более чем на 100 вопросов каждый день. Вопросы абсолютно разные. Не только по роботам. Это и базовые: как начать торговать, как открыть счет, сколько денег нужно и т.п., и нестандартные: вопросы по тарифам брокеров, по функционалу терминала QUIK, по данным от Мосбиржи и т.п.
Так как торговый робот для пользователя является конечным или финальным продуктом и если происходит сбой у брокера или в терминале QUIK или на бирже, то с точки зрения пользователя проблема всегда заключается в роботе! Это ведь он теперь работает не так как надо! И никого не волнует висит ли сервер брокера или поставляет ли Мосбиржа кривые котировки (нулевые цены и нулевую тек.позицию, при том что актив есть на балансе), отрубился ли интернет, заглючил или перезагрузился компьютер. Эти и другие проблемы приходится нам решать. Чтобы оказывать качественный сервис нужно знать гораздо больше, чем только алгоритм торговой стратегии.
Иногда думаешь, что всё, база знаний полная. В ней есть все вопросы и ответы. И за последние 3 месяца не было ни одного нового вопроса. И тут раз, появляется совершенно странный вопрос, который ставит тебя в тупик. Приходится подключаться дистанционно к пользователю, анализировать проблему, находить решение и добавлять его в базу знаний. И, если необходимо, то добавляется проверка в самого робота. Чтобы робот либо сам устранял ошибку, либо выдал сообщение пользователю о том что нужно сделать для продолжения торговли.
Так, постепенно, решая одну задачу за другой и набирается опыт, который позволяет чувствовать себя уверенно в алготрейдинге.
Спасибо всем, кто дочитал до конца!
Если вам интересны статьи о том как разрабатываются роботы, поддержите нас лайком. Мы будем знать нужно ли тратить время на подобные затеи или нет )) Может быть вам интереснее прочитать о более практических вещах? О конкретных стратегиях, их характеристиках в цифрах, рисках, доходностях? Напишите в комментариях. Мы обязательно вам ответим.
Желаем добра и успехов в трейдинге!
Остались вопросы по роботам?
Обращайтесь в личку или на почту mail@robot-scalper.ru
Откроем Вам бесплатно брокерские счета: демо и боевой! С версией терминала QUIK 7.27!
С уважением,
команда проекта «Робот Скальпер»
Поделка робот своими руками — простая инструкция с описанием, фото и видео
Робот – самый популярный вид поделок для детишек разных возрастных категорий. Полет фантазии здесь безграничен, его можно изготовить практически из любого, даже самого не подходящего на первый взгляд, материала: от пластиковой бутылки до ненужных коробок.

Перед началом процесса творения посмотрите фото готовых поделок роботов, их достаточно много, вы обязательно найдете именно ту работу, которая придется по душе.

Краткое содержимое обзора:
Поделка в детский садик
Каждый праздник в детском саду сопряжен рядом обязательных условий, к нему готовятся не только работники дошкольного заведения, но и родители вместе с детьми, любой из них сопровождается поделками своими руками. Наиболее интересным заданием является создание робота.

Преимущества домашних занятий
Совместное времяпровождение в семье очень важно для малыша для правильного формирования личности, а в совокупности с творчеством еще и позволяет развивать способности и выявлять предпочтения ребенка.

Запасы материала для изготовления
Задание — поделка робот из подручных материалов, подразумевает под собой неограниченные возможности, так получаются самые красивые и необычные варианты. Если дать волю своей фантазии, роботов можно делать из чего угодно.
Оптимальный вариант поделка робот из бумаги и картона или спичечного коробка. Превосходные модели получаются из пластиковых бутылок и крышечек от них, которые в изобилии храняться в наших квартирах.

Робота можно собрать из проволоки, такой экземпляр является более функциональной моделью, он может двигать руками и ногами. Подойти для поделки могут простые коробки, большие и маленькие, любого размера и сделать такой вариант очень просто.

Из мастики, для оформления выпечки, получаются съедобные экземпляры. Поделка робот своими руками увлекательное и творческое занятие.

Рекомендуем прочитать:



Как же сделать поделку робота, рассмотрим подробнее несколько идей

Более легкие варианты
Для сильно занятых родителей нужна поделка для создания которой не потребуется много времени и материала. С минимумом материальных затрат, но которую не стыдно будет показать. Желательно чтобы простая поделка робот в детский сад выглядела как серьезная работа созданная с самоотдачей.

Можно взять обычный упаковочный картон, для этого подойдет любая коробка и сделать из нее крупную поделку.

Руки и ноги прикрепляются отдельно, посредством сцепления пазлов, это необходимо для того чтобы изделие имело объем, а не плоскую форму. После останется лишь раскрасить макет гуашью и получиться весьма оригинальный робот.

Еще один интересный вариант
Коробочку для яиц можно превратить в настоящий шедевр. Для создания композиции лучше взять две, разного размера. Одна будет основанием туловища, а вторая головой робота.

Рекомендуем прочитать:



Чтобы окрасить поделку равномерно используйте поролоновую губку и разбавьте гуашь водой, краска ляжет ровно и не будет подтеков. Промокните кассету для яиц тщательно, чтобы ни осталось не прокрашенных щелей.

Еще немного о коробках
В каждом доме найдется несколько ненужных коробок, из которых может получиться очень привлекательный робот. Из под обуви – большие, чуть меньше от чая, зефира, печенья и совсем крошечные от соков или молока, все они могут стать основой для поделки робота в школу или детский сад.

Делаем красиво
- Обернем коробки белой бумагой, чтобы скрыть все ненужное. Впрочем, фон можно выбрать самостоятельно: серый, зеленый, синий будут смотреть еще эффектней.
- Из цветной бумаги другого оттенка вырезаем глаза и прочие мелкие элементы.
- Для создания рук и ног подойдут рулончики от туалетной бумаги. Чтобы они не сломались, заполняем их газетой. С ее же помощью прикрепить отдельные элементы к друг другу будет очень легко.
- Голова крепиться с помощью клея.
Еще один вариант
Делать типичные модификации не всегда предпочтительно. Можно разнообразить работу, создать робота используя дополнительные материалы. Глазки сделать из пенопластового шарика, разрезав его пополам, все остальное – это бумага, картон и краски.

Не обязательно делать его в полный рост, ручки и ножки могут быть мягкими, так робот будет представлен в сидячем положении.

Модернизированный робот
А если, для основания, взять коробку побольше, поместить в нее кассету из под яиц меньшего размера и прорезать небольшое окно, у робота будут видны все внутренние составляющие.

Рекомендуем прочитать:



Не ровная поверхность кассеты позволяет разукрасить и выделить различные элементы.

Это может быть колесики которые задают движение или любой другой механизм расположенный внутри конструктора.

Мягкий экземпляр
Не менее интересная модель может быть сконструирована из фетра:
- Туловище основание – 5 см;
- Голова робота – 4 см;
- Ножки – 2,5 см;
- Ручки – 2 см.

Для создания каждого квадратика необходимо заготовить шесть раскладок.

- Сшиваются в произвольной форме. Крупные стежки придадут эффектности.
- Готовые детали набиваются наполнителем, после они приклеиваются или пришиваются.
- Выбирая цвет материала можно обозначить пол, дополнительные элементы тоже возможны. Мальчику – роботу можно прикрепить галстук или бабочку, а для девочки подойдет элегантный бантик.
- Глазки – пуговички.

Из спичечных коробков
Оригинальность идеи состоит в том, что робот может быть трансформером. Количество коробков не ограничено, на все воля фантазии.

- Коробки, согласно предпочтениям, обклеивают цветной бумагой
- Детали соединяются между собой скрепками или для надежности, с помощью клея.

Поделка робот своими руками занимательное и креативное занятие для детей всех возрастов.