
Собираем роботпылесос на Arduino
Собираем робот-пылесос на Arduino


Шаг первый. Создаем поворотную платформу для робота
Для своей первой самоделки автор использовал танк из игры «Танковый бой», из игрушки были выброшены все лишние детали, остался только корпус, а также двигатели и колеса. После этого был установлен Arduino UNO, драйвер двигателей и ультразвуковой дальномер. В качестве источника питания использовались три литиевые батареи по 3.7 В.
Такая конструкция имела ряд минусов. К примеру, из-за того, что колеса находились сзади платформы, у робота возникали проблемы при повороте, робот часто буксовал.
Также из-за очень большой скорости передвижения робот порой не успевал реагировать на сигналы дальномера и врезался.


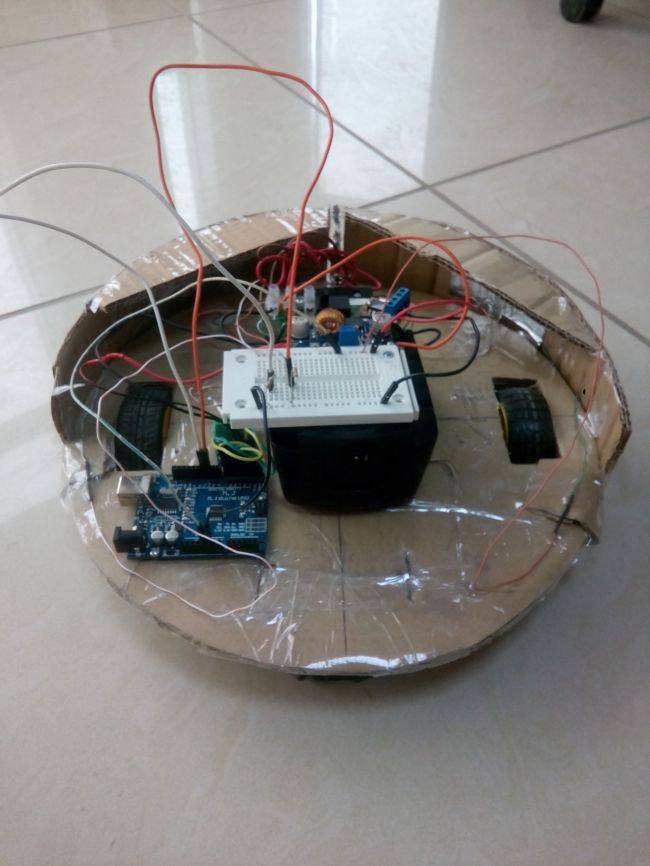
Все проблемы были решены путем сборки новой платформы из картона. Для этого нужно вырезать 2 круга диаметром 30 см, а затем склеить их поперек волокон. В итоге получается довольно прочная конструкция на изгиб. Что касается моторчиков и редукторов, то они были взяты из предыдущей самоделки.
Шаг второй. Создаем сенсоры
Изначально робот ориентировался за счет дальномеров, но автору их работа не понравилась и в итоге было решено от их избавиться. На их смену пришли контактные бампера, при этом робот стал вести себя адекватнее, да и вложений при этом требуется меньше.


Контактные бампера изготавливаются очень просто. Нужно взять картон и на одну его сторону приклеить фольгу, это будет первым контактом. К этой фольге нужно подать напряжение +5 В. Напротив платформы нужно установить изогнутый проводок от витой пары, он подключается через резистор, благодаря этому ложных срабатываний будет меньше. Когда робот будет во что-то врезаться, то будут замыкаться контакты, и затем электроника будет разворачивать робота в другом случайном направлении.
Шаг третий. Делаем пылесос и пылесборник
Благодаря таким материалам как картон и скотч можно быстро собрать практически любой макет. Для работы турбины используется источник питания в 18 Вольт, напрямую от батареи. При такой нагрузке кулеры греются, но работают.


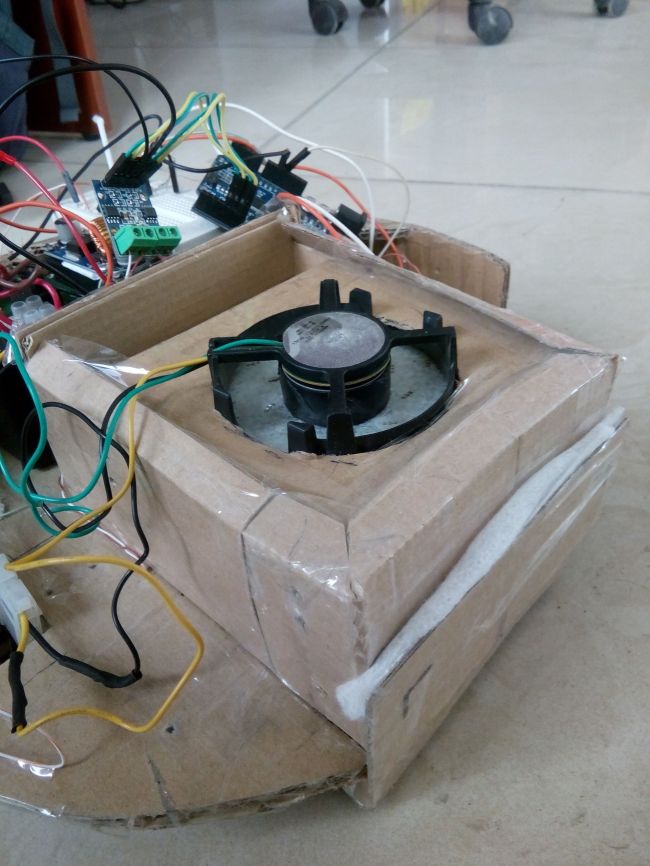



Для изготовления турбины берется кулер от компьютера и затем от него отламываются все лопасти. Далее на кулер крепится турбина от пылесоса, ее нужно приклеить суперклеем. Самое главное здесь — приклеить точно, не должно быть дисбаланса. Без нагрузки и питании 18 Вольт кулер выдает порядка 2600 RPM, что создает отличную тягу. В заключении вся конструкция собирается так, как можно увидеть на фото и после этого робота можно испытывать.
Что касается алгоритма работы, то он очень простой. Если робот во что-то врезается, он затем разворачивается на случайный угол.
В будущем автор планирует сделать платформу из фанеры, чтобы она была прочнее. Еще в планах установка двух щеток спереди для более эффективной сборки мусора. Выдуваемый воздух можно направить под платформу, чтобы пыль собиралась эффективнее.
Источник
Как сделать робот-пылесос своими руками — 2 идеи сборки



В современном ритме жизни не всегда получается поддерживать в доме чистоту. В этом деле поможет современные технологии. Робот-пылесос появился более 15 лет назад. Его типовой внешний вид напоминает крупную шайбу, которая передвигается по комнате по заданному алгоритму или случайным образом (пока на что-нибудь не наткнется) и собирает мусор. Предлагаем вам изучить 2 пошаговые инструкции, позволяющие сделать робот-пылесос своими руками.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку. Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Самодельный робот-пылесос должен определять столкновения со стенами и мебелью. Для этого нужно предусмотреть датчики препятствия и концевые выключатели на «бампере». Также нужен сам рабочий орган – пылесос. При этом он должен быть рассчитан на работу от постоянного тока низкого напряжения (например, 12В).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
- Аккумуляторы и контроллер заряда.
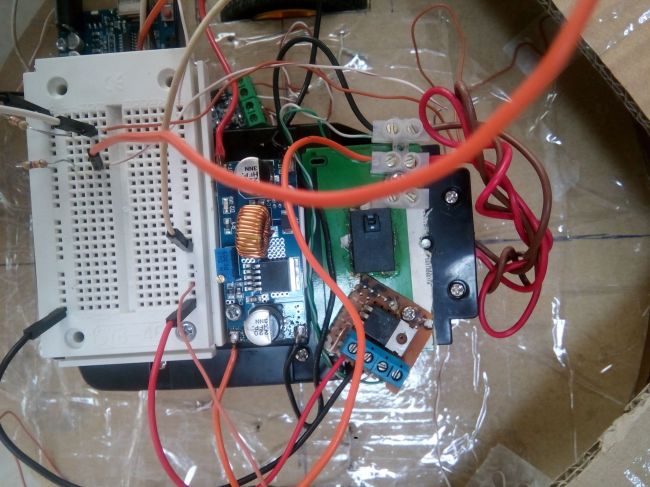
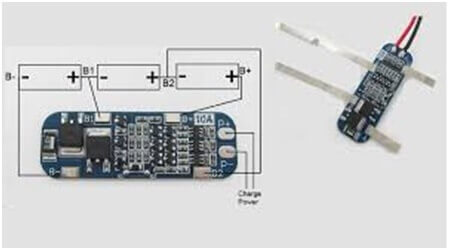
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:
Для управления двигателями привода робота удобно использовать модуль на L298-микросхеме. Схемотехнически это H-мост, вы можете его собрать своими руками из отдельных компонентов, но купить готовую плату будет надежнее. С его помощью вы можете задавать скорость движения робота-пылесоса и изменять направление вращения.
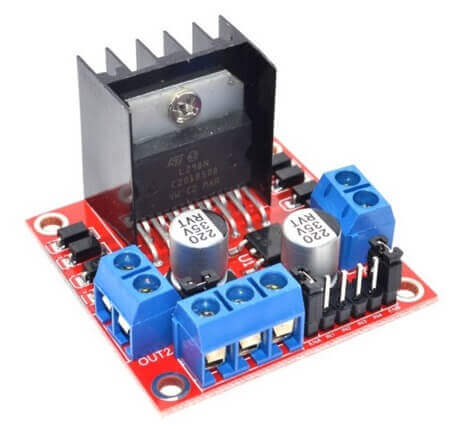
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя. При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0. Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

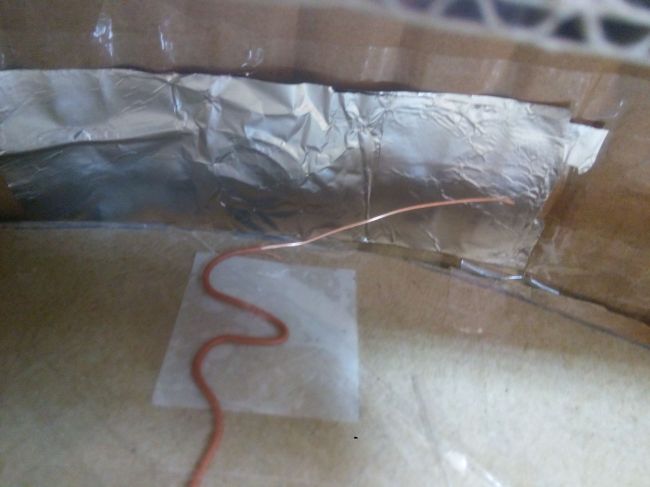
Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже. При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания. На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.


Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:
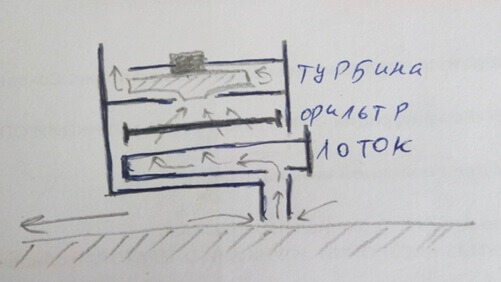
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса. Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации.

Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей

Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.
Идея №2: почти заводской робот
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
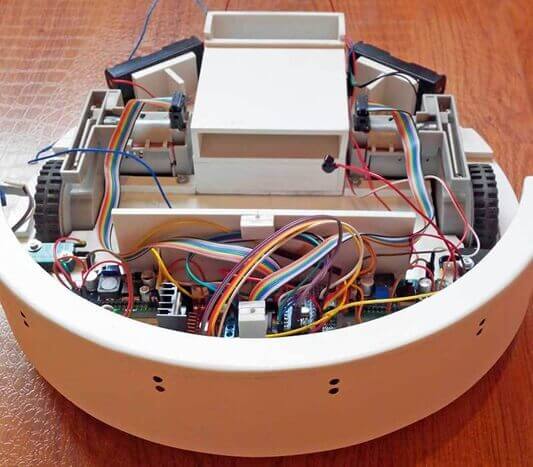
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:
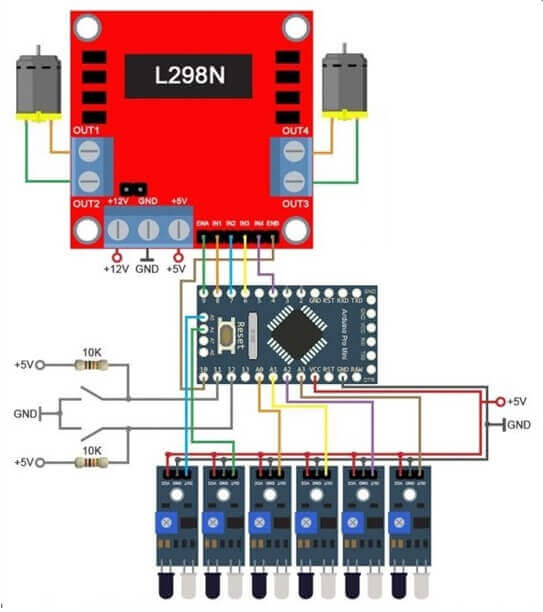
Схема сборки робота-пылесоса
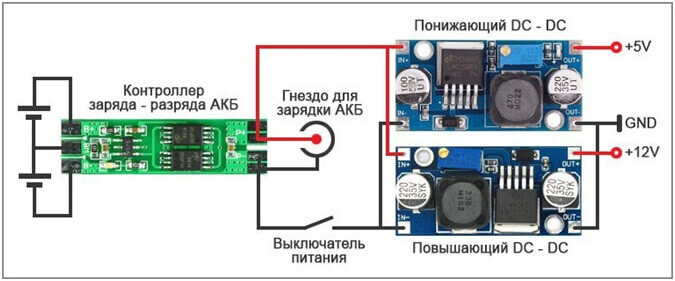
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.

Вот схема питания этого робота:
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов. Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино. Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
DIY: Несложный робот пылесос под Arduino своими руками. Пошаговая инструкция по изготовлению
Популярность автоматизированных домашних уборщиков с каждым днем возрастает. Не исключение, роботы-пылесосы для сухой уборки, способные поддерживать чистоту пола без вашего вмешательства. Принцип работы этих устройств очень прост и схож на прицип работы ручного пылесоса, главным отличием является наличие микроконтроллера, набора датчиков для самостоятельной работы, подзарядки и ориентировании в пространстве. Об этом мы ранее описывали в целой статье, специально посвященной роботизированным уборщикам полов.
Если вы хотите узнать, как он устроен и построить его собственными руками, представляем вашему вниманию инструкцию по сборке простейшего робота-пылесоса из подручных средств.

Материалы и компоненты:
Для создания робота-уборщика необходимы:
- плата Arduino;
- плата контроля электромоторов Arduino motor shield;
- два двигателя с коробкой передач (3 вольта, приблизительно 100 оборотов в минуту);
- два колеса или две алюминиевые банки;
- турбина-кулер компьютерного охлаждения (5 В или 12 Вольт);
- аккумулятор для питания 5 вольт;
- пластина для сбора радиоэлементов и провода;
- большой круглый пластиковый контейнер — для корпуса;
- небольшой пластиковый контейнер — для мусоросборника;
- картон;
- термоклей;
- магниты.


Шаг 1: Программный код и скетч:
Для правильной и точной работы в роботе-пылесосе существует «сердце» в виде микроконтроллера Arduino, программируемого с помощью домашнего ПК и необходимого программного обеспечения.
Скетч для работы робота-пылесоса загружается на плату с помощью программы Arduino IDE. Ниже программный код.



/*
Program for controlling a robot with two motors.
The robot turns when motors changes their speed and direction.
Front bumpers on left and right sides detect obstacles.
Ultrasonic sonars can be connected to analog inputs (tested on LV-MaxSonar-EZ1):
— put pins in array sonarPins in following order: left, right, front, others..
Examples:
1. only left and right sonars connected to pins 2 and 3: sonarPins[] = <2,3>
2. left, right and front sonars connected to pins 2, 3 and 5: sonarPins[] = <2,3,5>
3. only front sonar connected to pin 5: sonarPins[] = <-1,-1,5>
4. only left sonar connected to pin 2: sonarPins[] = <2>
5. only right sonar connected to pins 3: sonarPins[] = <-1,3>
6. 5 sonars connected to pins 1,2,3,4,5: sonarPins[] = <1,2,3,4,5>
Motor shield is used to run motors.
*/
const int Baud = 9600; //UART port speed
//Sonar properties
int sonarPins[] = <1, 2>;//Analog Pin Nums to sonar sensor Pin AN
const long MinLeftDistance = 20; //Minimum allowed left distance
const long MinRightDistance = 20; //Minimum allowed right distance
const long MinFrontDistance = 15; //Minimum allowed front distance
const int SamplesAmount = 15;//more samples — smoother measurement and bigger lag
const int SonarDisplayFrequency = 10; //display only one of these lines — not all
int sonarDisplayFrequencyCount = 0;
const long Factor = 2.54 / 2;
long samples[sizeof(sonarPins)][SamplesAmount];
int sampleIndex[sizeof(sonarPins)];
//right side
const int pinRightMotorDirection = 4; //this can be marked on motor shield as «DIR A»
const int pinRightMotorSpeed = 3; //this can be marked on motor shield as «PWM A»
const int pinRightBumper = 2; //where the right bumper is connected
//left side
const int pinLeftMotorDirection = 7; //this can be marked on motor shield as «DIR B»
const int pinLeftMotorSpeed = 6; //this can be marked on motor shield as «PWM B»
const int pinLeftBumper = 8; //where the right bumper is connected
//uncomment next 2 lines if Motor Shield has breaks
//const int pinRightMotorBreak = PUT_BREAK_PIN_HERE; //this can be marked on motor shield as «BREAKE A»
//const int pinLeftMotorBreak = PUT_BREAK_PIN_HERE; //this can be marked on motor shield as «BREAKE B»
//fields
const int turnRightTimeout = 100;
const int turnLeftTimeout = 150;
//set in counter how long a motor is running back: N/10 (in milliseconds)
int countDownWhileMovingToRight;
int countDownWhileMovingToLeft;
//Initialization
void setup() <
Serial.begin(Baud);
initPins();
//uncomment next 4 lines if Motor Shield has breaks
// pinMode(pinLeftMotorBreak, OUTPUT);
// pinMode(pinRightMotorBreak, OUTPUT);
// digitalWrite(pinLeftMotorBreak, LOW); //turn off breaks
// digitalWrite(pinRightMotorBreak, LOW); //turn off breaks
runRightMotorForward();
runLeftMotorForward();
startMotors();
>
//Main loop
void loop() <
delay(10);//repeat every 10 milliseconds
>
//—————————————————
void initPins() <
pinMode(pinRightMotorDirection, OUTPUT);
pinMode(pinRightMotorSpeed, OUTPUT);
pinMode(pinRightBumper, INPUT);
pinMode(pinLeftMotorDirection, OUTPUT);
pinMode(pinLeftMotorSpeed, OUTPUT);
pinMode(pinLeftBumper, INPUT);
for(int i = 0; i MinRightDistance //checks if the minimum allowed right distance is not reached
&& measureDistance(2, ‘F’) > MinFrontDistance)//checks if the minimum allowed front distance is not reached
return;
if(checkCounterIsNotSet(countDownWhileMovingToRight))//if the counter is not yet counting down
runRightMotorBackward();//run the right motor backward
countDownWhileMovingToRight = turnRightTimeout;//set the counter to maximum value to start it counting down
>
void verifyAndSetLeftSide() <
if(checkBumperIsNotPressed(pinLeftBumper) //checks if left bumper has NOT been pressed
&& measureDistance(0, ‘L’) > MinLeftDistance //checks if the minimum allowed left distance is not reached
&& measureDistance(2, ‘F’) > MinFrontDistance)//checks if the minimum allowed front distance is not reached
return;
if(checkCounterIsNotSet(countDownWhileMovingToLeft))//if the counter is not yet counting down
runLeftMotorBackward();//run the right motor backward
countDownWhileMovingToLeft = turnLeftTimeout;//set the counter to maximum value to start it counting down
>
bool checkCounterIsNotSet(int counter) <
return counter = sizeof(sonarPins) — 1 || sonarPins[pinIndex] = SamplesAmount)
sampleIndex[pinIndex] = 0;
samples[pinIndex][sampleIndex[pinIndex]] = value;
return true;
>
long calculateAvarageDistance(int pinIndex) <
long average = 0;
for(int i = 0; i
Шаг 2: Монтирование деталей:
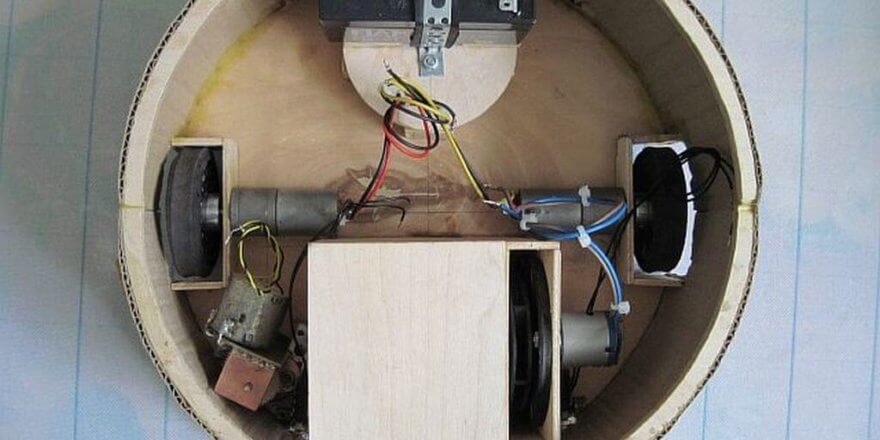
Для крепления сервоприводов с колесами, кулера, плат управления, аккумулятора и другого используется картонная основа. Турбина и пластиковый контейнер (мусоросборник), с проделанным предварительно отверстием, прочно склеивается между собой и крепится на картон. Контейнер имеет отверстие для выдуваемого воздуха, на которое наклеена специальная синтетическая ткань, служащая фильтром.
Последовательно склеиваем кулер с сервоприводами, затем на сервоприводы клеим картонную площадку, на которой располагаются платы Arduino и батарея питания. Чтобы сделать колеса, необходимо отрезать нижнюю и верхнюю часть алюминиевых банок, склеить их между собой, а затем прочно закрепить на валу сервопривода.
В передней части монтируются металлические пластины (функция подвижного бампера), при замыкании которых сигнал поступает в плату управления электродвигателями Arduino motor shield, после чего сервоприводы начинают вращаться в другую сторону, изменяя направление движения робота.




Шаг 3: Установка корпуса:
При установке аккумуляторной батареи и подключении всех элементов конструкции с помощью проводов, необходимо обеспечить устройство прочным корпусом. Как раз таки для этого используется большой круглый контейнер. Для действия контактов, предотвращающих столкновение и застревание, делаем в контейнере специальные надрезы. Чтобы корпус был легкосъемным и прочно держался на механической части, используем восемь магнитов (при желании можно больше), по четыре приклеенных на самом контейнере и на внутренней части пылесоса соответственно.




Прекрасный прототип робота-пылесоса, сделанного своими руками. Не беря во внимание отсутствие дополнительных датчиков навигации и базы автоматической подзарядки, данный аппарат за пол часа работы вполне самостоятельно может собрать мусор, пыль и грязь на вашей кухне или в небольшой комнате. Его конструкция не представляет большой сложности, а стоимость и доступность деталей не вызывает сомнения. Все дело в творческом подходе. Вы можете менять элементы конструкции по вашему усмотрению, добавлять или убирать лишние элементы, модернизируя свой аппарат. Желаем приятно провести время, создавая свой робот для сухой уборки полов у вас дома.
Лучший робот пылесос 2018 года

Робот пылесос 2018 ► 5 лучших моделей 2018 года. Критерии рейтинга: время работы без подзарядки, качество уборки, режимы работы и мощность всасывания.
Представляем рейтинг лучших роботов-пылесосов 2018 года по нашей версии. Первый робот-пылесос появился в 2003 году от компании — первопроходца iRobot. С тех пор технологии шагнули далеко вперед и на рынке сегодня большая конкуренция среди производителей. С каждым годом у пылесосов увеличивается время работы без подзарядки, добавляются новые функции, оптимизируется режим работы и т.д.
Топ-5 роботов-пылесосов 2018 года
Мы решили составить обзор лучших моделей уходящего года и составить свой рейтинг Топ-5 роботов пылесосов 2018 года. Критерии, по которым составлялся рейтинг: время работы без подзарядки, качество уборки помещения, режимы работы и способность собирать пыль в труднодоступных местах. В наш рейтинг роботов пылесосов 2018 попали недорогие модели из одной ценовой категории — до 20 000 рублей.
5 место. Сlever & Clean 004 m-series
Робот-пылесос от китайского производителя Clever & Clean расположился на пятом месте рейтинга. Компания предлагает доступный широкому кругу покупателей робот с полноценными функциями по цене от 8 000 рублей. Габариты: диаметр 27 см, высота 7,4 см, вес прибора 1,5 кг, пылесборник объемом 0,2 литра. Емкость аккумулятора – 850мА*ч, позволяет работать 50 минут без подзарядки, убирая площадь до 50 кв.м.
Робот-пылесос Сlever & Clean 004 m-series
Это бюджетный прибор без функции влажной уборки полов (можно приобрести моющую панель), способный поддерживать чистоту в небольшой квартире. Робот пылесос для пола не имеет сложных настроек и прост в обслуживании. Управление аппаратом производится с помощью кнопок на корпусе. В модель 004 m-series встроены датчики распознавания загрязненных участков, определения препятствий.
4 место. iPlus X500pro
Если предыдущая модель попала в наш рейтинг только благодаря своей низкой цене, то робот iPlus X500pro имеет все необходимые функции, чтобы поддерживать чистоту в доме при стоимости от 8 000 рублей. Габариты: диаметр 34 см, высота 9 см, вес прибора 4 кг, пылесборник объемом 0,4 литра. Емкость аккумулятора 2200 мА*ч, позволяет работать 90 минут без подзарядки. Мощность всасывания 65 Вт.
Робот-пылесос iPlus X500pro
Модель от компании ТМ cleverPanda (фото на картинке выше), рассчитана только на сухую уборку пола и ковров в квартире. Управление прибором осуществляется с помощью пульта ДУ, можно настроить маршрут и задать время начала уборки. Есть встроенные датчики препятствия и изменения высоты. iPlus X500pro можно назвать лучшим роботом пылесосом 2018 года среди бюджетных моделей.
3 место. iPlus X600pro
Далее в нашем рейтинге идут модели роботов пылесосов 2018 года с влажной уборкой полов. Аппараты стоят дороже, но имеют удобную функцию влажной протирки пола. Стоимость iPlus X600pro от 12 000 рублей. Габариты: диаметр 34 см, высота 8,7 см, вес прибора 4,5 кг, пылесборник объемом 0,5 литра. Емкость аккумулятора 2200 мА*ч, позволяет работать 90 минут без подзарядки. Мощность всасывания 85 Вт.
Робот-пылесос iPlus X600pro
В аппарате предусмотрено 5 разных режимов уборки: автоматический, вдоль стен комнаты, локальный, по расписанию. Управление прибором осуществляется с пульта или непосредственно с корпуса пылесоса. Из датчиков можно отметить «виртуальную стену» и ИК-датчик для обнаружения загрязненных мест. Вместо центральной щетки установлена подушка для сбора шерсти домашних животных с пола и ковров.
2 место. iRobot Roomba 616
Несмотря на то, что модель не имеет функции влажной уборки пола, мы поставили ее на второе место нашего рейтинга. Недостаток компенсируется улучшенной навигацией и мощной силой всасывания при стоимости от 19 000 рублей. Габариты: диаметр 34 см, высота 9,2 см, вес прибора 3,6 кг, пылесборник объемом 0,5 литра. Емкость аккумулятора 2200 мА*ч, позволяет работать 120 минут без подзарядки.
Робот-пылесос iRobot Roomba 616
Одним из преимуществ аппарата можно назвать автономность: пылесос способен собирать пыль с пола до двух часов без подзарядки. Робот оборудован виртуальной стеной, а датчик высоты не позволит роботу упасть со ступенек. Модель не запутается в проводах и самостоятельно паркуется в док-станцию на зарядку. В комплекте идет улучшенная батарея XLife и собственная система навигации iAdapt.
1 место. Genio Deluxe 500
Первое место рейтинга 2018 года занимает робот пылесос Genio Deluxe 500 при стоимости от 17 000 рублей. Габариты: диаметр 34 см, высота 8,7 см, вес прибора 3,3 кг, пылесборник объемом 0,65 литра. Емкость аккумулятора 2600 мА*ч, позволяет работать 250 минут без подзарядки. Емкость для воды 300 мл. Если заряда не хватит для уборки, пылесос самостоятельно приедет на базу для подзарядки.
Genio Deluxe 500. Самый лучший робот пылесос 2018 года
Аппарат можно запрограммировать на уборку в любое время в любой день недели. Управление осуществляется через пульт или со смартфона. В модели предусмотрено несколько режимов уборки: точечная и влажная уборка, очистка вдоль стен. Степень увлажнения салфетки и мощность всасывания (стандартный и максимальный) можно регулировать. В комплекте предусмотрены щетки для разных типов покрытий.
Лучший робот пылесос с влажной уборкой пола
Отзывы о роботах пылесосах, которые достойны попасть в рейтинг 5 самых лучших моделей по итогам 2018 года вы можете оставлять в комментариях к этой записи.
