Самодельный робот пылесос в домашних условиях
Как сделать робот-пылесос своими руками: алгоритм производства домашнего помощника
Робот-пылесос – нужная машина. Но у нее есть один существенный недостаток – цена.
Хорошая модель стоит недешево, а дешевая модель больше напоминает игрушку, но за нее тоже нужно заплатить определенную сумму.
Поэтому народные умельцы предпочитают собирать такие системы самостоятельно, благо в продаже для этого есть все комплектующие.
Многие из них охотно рассказывают, как сделать пылесос-робот своими руками.
Самое важное в этом деле, кроме необходимой базы запчастей, — почувствовать себя настоящим конструктором и не бояться экспериментировать. А получившуюся модель всегда можно улучшить.
Материалы для сборки робота-пылесоса в домашних условиях
Перед тем, как сделать робот-пылесос, нужно подготовить все необходимое.

- Ножницы;
- Циркуль;
- Простой карандаш;
- Линейка;
- Пистолет для термоклея;
- Две трубки термоклея.
- Гофрированный картон размером 1.5х1.0 м;
- Марля размером 0.3х0.3 м;
- Резинка для банкнот.
- Два блока колес;
- Плата ARDUINO UNO;
- Драйвер двигателя L298N;
- Два мотора на метелки по 12 В;
- Датчик приближенности для Ардуино ультразвуковой;
- Блок аккумуляторов;
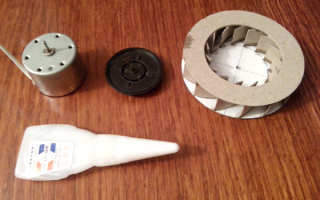
- Кулер от компьютера из системного блока;
- Опорное колесо.
Как сделать робот-пылесос своими руками в домашних условиях
Когда все комплектующие и материалы в наличии, следует преступить к сборке.

Общий план таков:
- Вначале собирают корпус – здесь каждая деталь оригинальна и изготавливается отдельно;
- Следующий этап – установка Ардуино для робота-пылесоса своими руками и другой электроники, блока аккумуляторов и коммутация их проводами;
- В корпус устанавливают приводы – это колеса и моторы боковых щеток;
- Далее изготавливают всасывающий узел и крепят его к корпусу;
- Крепят самодельные боковые метелки;
- Программируют устройство и проводят полевые испытания;
- Если все работает, закрывают корпус верхней панелью.
Сборка корпуса из картона и установка Ардуино
Как сделать робот-пылесос, начиная с корпуса:
- Из картона вырезают два круга диаметром 46 см. Один круг – это нижнее основание корпуса, другой – верхняя панель;
- В нижней части посередине вырезают отверстие, равное диаметру крыльчатки компьютерного кулера;
- Впереди нижней части по бокам вырезают два прямоугольника под моторы боковых щеток (ориентир – как у любого промышленного аппарата);
- Сзади по бокам вырезают пазы под ведущие колеса – чем ближе к краю корпуса, тем лучше. Строго впереди – паз под опорное колесо;
- Из картона вырезают прямоугольник размером 20 см на 146 см;
- Гофрированный картон надрезают по одной плоскости через каждые 2 см. Режут поперек длинной стороны;
- Полученную заготовку сворачивают в цилиндр и приклеивают к основанию термоклеем. Таким же способом приклеивают блоки колес, моторы на метелки, опорное колесо;
- Блок Ардуино, соединенный с драйвером колес, крепят в передней части внутри корпуса, не закрывая среднее отверстие под турбину;
- В торцовой части впереди вырезают два отверстия под датчик приближения.
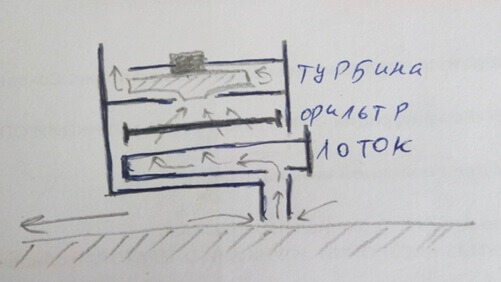
Изготовление всасывающего модуля с турбиной
- Из картона делают прямоугольный канал без торцовых частей, размер которых равен размеру основания кулера. Высота канала 25 см;
- Посередине канала под наклоном 30 градусов вклеивают перегородку. С верхней стороны наклона должен быть зазор шириной 2 см между перегородкой и стенкой канала;
- Изготавливают маленькую коробочку без крышки с размером сторон равным размеру перегородки и высотой бортов 5 см и устанавливают ее на перегородку;
- Под перегородку в низ основания канала вставляют и вклеивают кулер так, чтобы он дул на перегородку;
- На верхнюю часть канала надевают кусок марли, и свободные концы фиксируют резинкой для банкнот вокруг канала;
- Канал стороной кулера приклеивают напротив отверстия в середине основания пылесоса;
- В верхней панели вырезают прямоугольник под канал и надевают сверху.
Коммутация схем и настройка программы
После того, как установлены все элементы, питание колес подключают на драйвер колес на соответствующие управляемые разъемы. Моторы метелок подключают к выводам, где появляется постоянное напряжение при включении тумблера.

Тумблер впаивают между батареей и питанием схемы Ардуино. Схему датчика приближения подсоединяют к Ардуино. При включении тумблера пылесос начнет двигаться по площади, обходя предметы.
Настройка платы заключается в регулировке скорости (величины подачи напряжения на ведущие колеса), которая не должна превышать 30-25 см/с. Чтобы аппарат не ехал куда не нужно, можно подумать, как сделать виртуальную стену для пылесоса-робота своими руками.
Сборка корпуса из пластика и фанеры
Как сделать робот-пылесос не из картона, а, например, из пластика и фанеры? Очень просто.
В этом случае нижнюю часть вырезают из 4 мм фанеры при помощи электролобзика (размеры аналогичны вышеописанным).
В качестве торцовой части корпуса и верхней крышки можно использовать пластиковое ведро из-под фасадной краски (диаметр не должен превышать основания). Его обрезают так, чтобы высота с дном не превышала 20 см.

После того как на нижней части установят все оборудование и на ведре закрепят датчик приближения, ведро переворачивают и прикрепляют к основанию при помощи уголков.
Изготовление системы всасывания пыли
Турбину для робота-пылесоса своими руками в этом варианте конструкции можно изготовить по-иному принципу:
- В качестве емкости пылесборника берут пластиковую емкость (объем — 1 литр);
- В дне емкости посередине делают прорез шириной 1 см и длиной 10 см;
- Из прозрачного файла для бумаги вырезают прямоугольник шириной 3 см и длиной 12 см;
- Этим прямоугольником накрывают прорезь внутри емкости и фиксируют пленку с одной стороны скотчем на всю длину (12 см);
- Получается клапан, который при втягивании воздуха внутрь емкости открывается, а при выключении пылесоса перекрывает канал;
- В крышке от емкости делают отверстие, по диаметру равное диаметру крыльчатки вентилятора;
- Вентилятор крепят к крышке с внутренней стороны, с наружной – наклеивают мелкую пластиковую москитную сетку;
- Крышку ставят на место – турбина готова.
Как и в предыдущем варианте робота-пылесоса, после проведения всех работ по коммутации устройств между собой, необходимо провести настройку прибора.

Эта настройка заключается в выборе скорости движения машины. Отвечает за эту функцию драйвер двигателя.
Заключение
Рассмотренные самодельные модели роботов-пылесосов хороши для проведения быстрых уборок, когда нужно подмести полы.
Чтобы подобные аппараты могли хорошо втягивать и пыль – недостаточно обычного вентилятора от компьютера.
Нужно использовать более мощные моторы, например, от фена, и лопасти нужно изготавливать другой конструкции.
В этих же моделях для лучшего эффекта всасывания нужно соблюсти расстояние от дна до пола не более 1 см.
Робот-пылесос самодельной конструкции нельзя использовать в местах, где есть возможность падения его с высоты.
В простой системе не предусмотрены датчики контроля уровня пола. В сети имеются лайфхаки как сделать пылесос-робот моющим.
Видео: Как сделать робот-пылесос своими руками
Как сделать робот-пылесос своими руками — 2 идеи сборки



В современном ритме жизни не всегда получается поддерживать в доме чистоту. В этом деле поможет современные технологии. Робот-пылесос появился более 15 лет назад. Его типовой внешний вид напоминает крупную шайбу, которая передвигается по комнате по заданному алгоритму или случайным образом (пока на что-нибудь не наткнется) и собирает мусор. Предлагаем вам изучить 2 пошаговые инструкции, позволяющие сделать робот-пылесос своими руками.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку. Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Самодельный робот-пылесос должен определять столкновения со стенами и мебелью. Для этого нужно предусмотреть датчики препятствия и концевые выключатели на «бампере». Также нужен сам рабочий орган – пылесос. При этом он должен быть рассчитан на работу от постоянного тока низкого напряжения (например, 12В).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
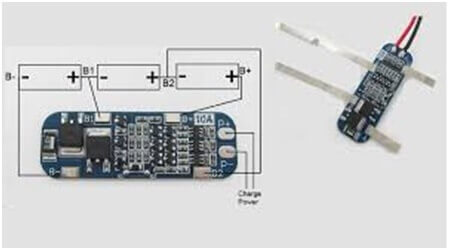
- Аккумуляторы и контроллер заряда.
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:
Для управления двигателями привода робота удобно использовать модуль на L298-микросхеме. Схемотехнически это H-мост, вы можете его собрать своими руками из отдельных компонентов, но купить готовую плату будет надежнее. С его помощью вы можете задавать скорость движения робота-пылесоса и изменять направление вращения.
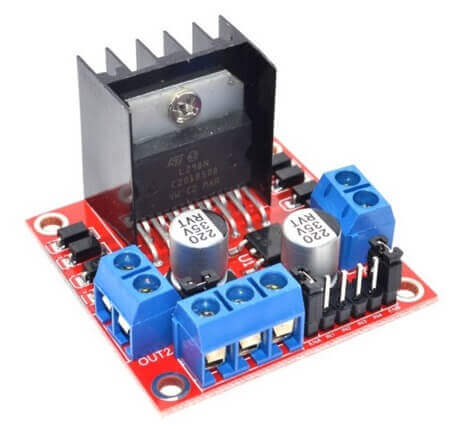
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя. При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0. Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
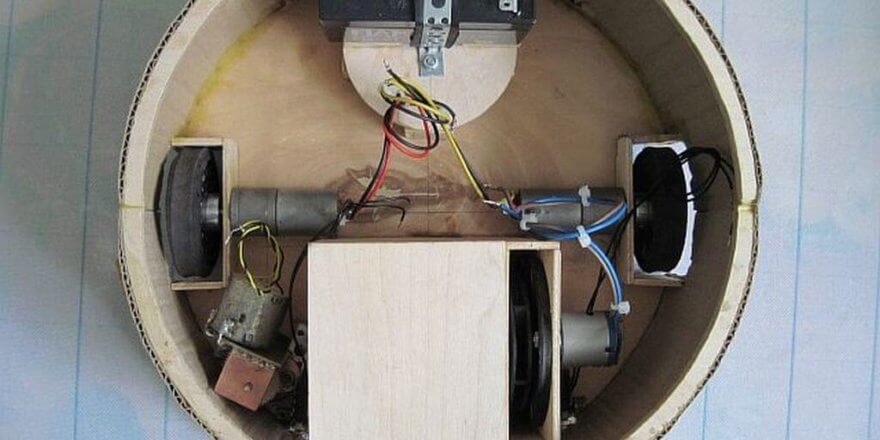
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже. При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания. На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.


Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса. Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации.

Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей

Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.
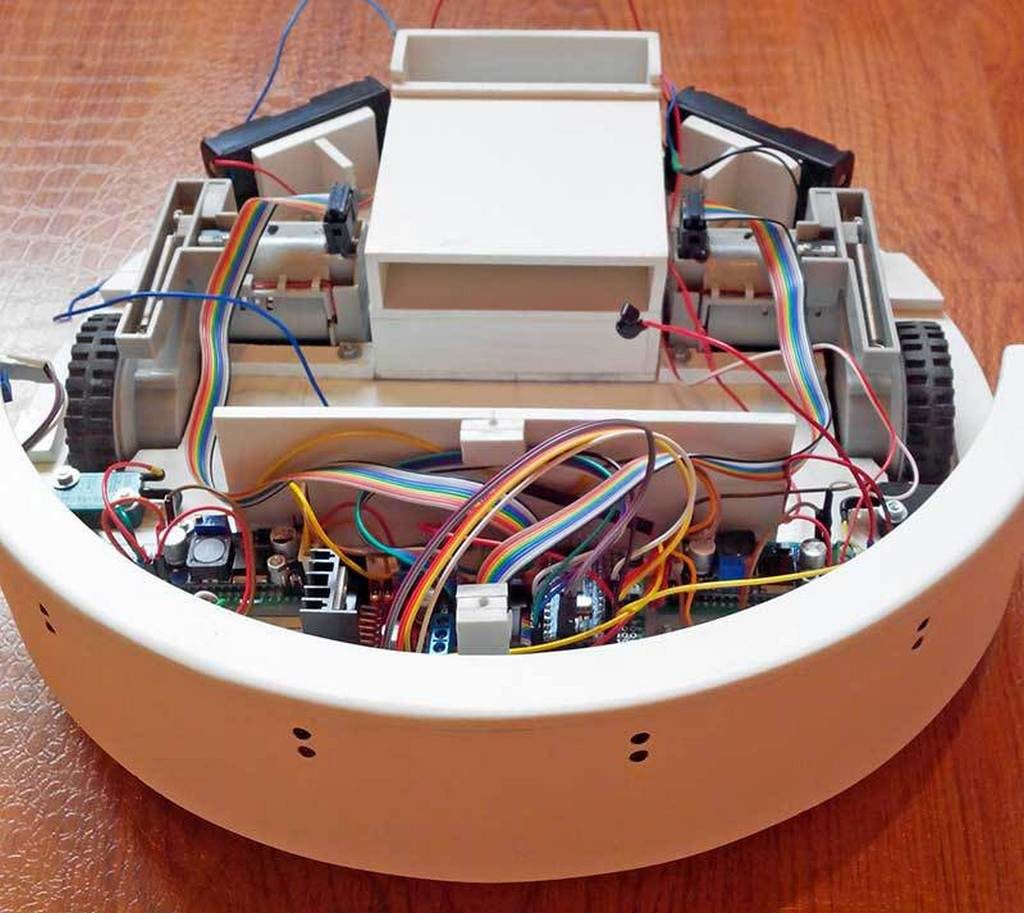
Идея №2: почти заводской робот
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
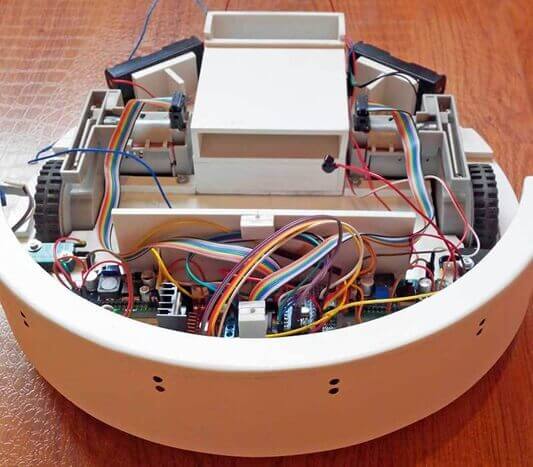
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:
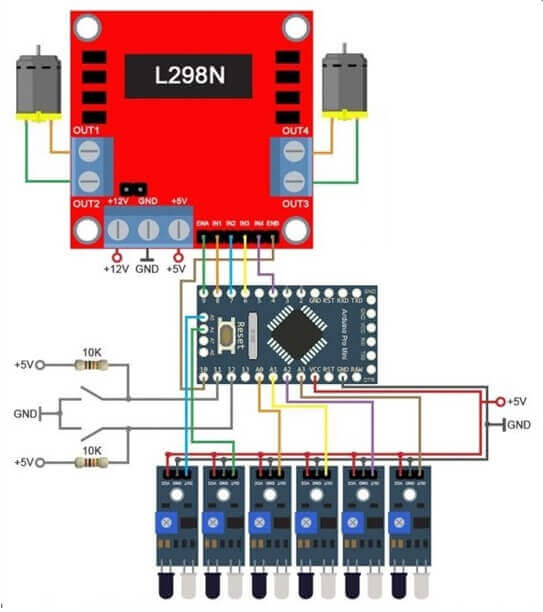
Схема сборки робота-пылесоса
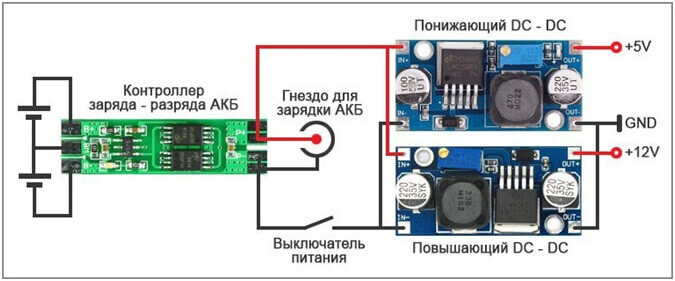
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.

Вот схема питания этого робота:
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов. Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино. Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
Как сделать робот-пылесос?
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени. Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно. Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться. У вас всегда есть возможность создать самодельный робот-пылесос. Само собой, сделать такое устройство своими руками и в домашних условиях — это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой. Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.

Робот-пылесос своими руками
Описание самодельного робота пылесоса
Если вы хотите создать механизм, который будет идеально подходить для очистки поверхностей пола в вашем доме, вам следует внимательно соблюдать все правила, которые предписывает схема сборки, представленная в следующем пункте.
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
- Загрузить необходимое программное обеспечение. Если вы хотите сделать свой робот-пылесос максимально похожим на заводские аналоги (исходя из выполняемых функций), вам нужно будет загрузить на микроконтроллер «Ардуино» необходимое программное обеспечение. Это можно сделать при помощи обыкновенного персонального компьютера — достаточно лишь загрузить код на плату «Ардуино».
- Закрепить основные компоненты. Чтобы средства передвижения робота-пылесоса, кулер, микросхемы, аккумуляторы и вся прочая начинка устройства были надежно закреплены, вам потребуется фанерная основа. Она же по совместительству будет днищем вашего пылесоса. Туда же крепятся предварительно склеенные между собой при помощи суперклея турбина и емкость для сбора отходов. Также контейнер должен быть оборудован специальной трубкой, через которую будет выводиться выдуваемый воздух. Она должна быть защищена плотной тканью, которая послужит средством фильтрации. Кулер должен быть последовательно склеен со всеми сервоприводами, после чего посажен на все ту же фанерную площадку, на которой к тому времени уже должны быть монтированы микросхемы и аккумуляторы для подпитки устройства. Колеса для робота пылесоса могут быть куплены на рынке (однако вы можете предпринять попытку сделать их своими руками из консервной банки).

Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Изготовление робота-пылесоса в домашних условиях
Необходимые материалы
Чтобы сделать робот-пылесос своими руками, вам потребуются следующие материалы:
- «Ардуино Про Мини» — главный мозг и информационный центр всей конструкции.
- Драйвер моторов робота-пылесоса серии Л298Н.
- Понижающий преобразователь переменного тока.
- Модуль с мосфетом, посредством которого будет осуществляться контроль над темпом работы передней щетки устройства.
- 4 инфракрасных датчика, которые будут фиксировать наличие препятствий на пути робота пылесоса.
- Пара переключателей, которые будут изменять направление движение устройства при столкновении.
- 3 шарообразных колеса.

Колеса для самодельного робота-пылесоса
- Мотор, обеспечивающий вращение щетки в различных режимах.
- Мотор высокой мощности, обеспечивающий нормальное функционирование турбины.
- 4 литийионных аккумулятора, а также средство контроля над ними.
- Фанерное основание нужного размера.
- Корпус из поливинилхлорида нужного размера.
- 8 пар магнитов для крепления.
- Провода, кабели, переключатели и прочие элементы электрической сети.

Автор, специалист в сфере IT и новых технологий.
Получил высшее образование по специальности Фундаментальная информатика и информационные технологии в Московском государственном университете имени М.В. Ломоносова. После этого стал экспертом в известном интернет-издании. Спустя время, решил попробовать писать статьи самостоятельно. Ведет популярный блог на Ютубе и делится интересной информацией из мира технологий.
Робот пылесос своими руками

Уборка дело хлопотное и иногда может занять очень много времени, но каждому хочется, чтобы его квартира или дом, был чистым ухоженным и опрятным. Часто бывают ситуации, когда только приберёшь во всех комнатах, пропылесосишь, положишь всё на свои места, но потом через пару часов на полу появляются первые крошки, пыль и прочий мусор, и не всегда хочется повторять эту процедуру по новой. Именно для таких случаем миру был представлен робот пылесос.
Робот, полностью в автоматическом режиме, прекрасно справляется с небольшим мусором, который так часто надоедает. Однако стоимость устройства иногда бывает оскорбительно большая, но это совсем не проблема, робот пылесос своими руками, отлично справляет с поставленными задачами.
Основные требования при создании
- Созданный пылесос должен быть цилиндрической формы, и не очень высоким (ему необходимо попадать под тумбочки, столы, прочее).
- Диаметр колес выбирать с учетом возможности саморазворота.
- Колесо ответственное за «подруливание» обходится без мотора.
- Контактный бампер очень важная составляющая, без него не обойтись, также необходимо учитывать, что он должен занимать не менее половины периметра всего робота.
- У робота, идеального сцепления можно достичь если центр тяжести буде совпадать с колёсами.
- Максимальная практичность мусоросборника, он должен вынимать одним движением.
Основные алгоритмы движения:
Робот пылесос своими руками будет выполнять свою работу на отлично, только с правильным алгоритмом движения. Основных алгоритмов (те, которые показали максимальное КПД) всего два: движение по спирали, увеличивающей из центра комнаты до её краёв, либо зигзагообразные движения из одной стороны комнаты в другую.
Идеальная траектория этих движения построена в идеальных условиях, не учитывая препятствия. Следовательно, что для каждого помещения следует выбирать один из дух представленных вариантов движения.
Робот пылесос своими руками — качество уборки
Робот сделанный собственными руками, конечно, не сравнится с полноценным пылесосом по качеству уборки, однако, такое устройство прекрасно справляется с мелким и надоедливым мусором, особенно если дополнительно оборудовать пылесос щетками и специальными насадками, которые смогу всасывать грязь из углов и других труднодоступных мест.
Мощность такого агрегата
Робот настраивается самостоятельно, скорость и мощность двигателя зависит от вас. Оптимальная скорость такого агрегата находится в пределах 25-30 см/сек, она не слишком высокая, но и не медленная для сбора мусора и батареи хватает на большую площадь работы.
Для работы лучше всего использовать шаговые двигатели, они не будут «забирать» лишнюю мощность у двигателей и заряд у батареи, с такими двигателями передача вращательного момента может быть прямая или через специальные ремни.
Датчики
Любой робот пылесос оборудован разными датчиками, также не отходит от этих догм. На таком устройстве обязательно должен быть инфракрасный датчик, он не даст роботу поцарапать стены или упасть с лестницы, даже если они по какой-то причине не сработают, то всегда есть датчики на бампере, останавливающие устройство за несколько сантиметров от преграды. Далее датчики прекращения работы, устанавливаются они на колёса, так при подъёме робот от отключится автоматически. Более сложных моделях можно использовать датчики возврата на базу, для подзарядки батареи.