
Датчик расстояния для робота пылесоса своими руками
Как работает робот-пылесос для сухой и влажной уборки
Умная техника достаточно прочно вошла в повседневную жизнь наших соотечественников. Ярким примером тому можно считать наличие практически в каждом доме стирального автомата, Smart-телевизора, компьютера. Автоматизация коснулась и такого процесса, как поддержание чистоты помещения, за которую отвечают весьма смышленые и самостоятельные роботы-уборщики. О том, что такое современный робот пылесос и пойдет речь в данной публикации.
Конструкция робота пылесоса
Современный рынок предлагает потребителю невероятный ассортимент моделей умных уборщиков, которые отличатся габаритами, способом ориентирования, алгоритмом действий и наличием дополнительных возможностей. Внешне, большинство моделей данной категории выглядят в виде диска из ударопрочного и легкого полимера с установленным на нем бампером, предотвращающим повреждение устройства при столкновении с препятствием.
В зависимости от модели диаметр устройства может быть от 250 до 350 мм. Высота от пола до верхней точки корпуса не более 130 мм.
Устройство бытового робота пылесоса включает в себя следующие элементы и механизмы:
- Видеокамеру, которая дает прибору возможность ориентирования. Благодаря камере робот составляет карту перемещения и корректирует план уборки.
- Пылесборник — съемный, пластиковый, многоразовый контейнер с емкостью от 0,4 до 1 л, который вынимается из корпуса нажатием специальной кнопки.
- Фильтры очистки, предназначенные для очистки от пыли выходящих из устройства воздушных потоков. Конструкция фильтроэлементов дает возможность владельцу проводить их обслуживание самостоятельно.
- Мощный механизм всасывания, который в совокупности с продуманной системой перемещения щеток, обеспечивает качественную уборку при крайне низком уровне шума.
- Датчики необходимы для сканирования пространства, отслеживания пройденного расстояния, определения препятствий, «обрывов» и участков с максимальным загрязнением.
- Колеса для передвижения. Практически все модели роботов-пылесосов оснащены тремя колесами: два боковых отвечают за перемещение устройства; колесо в передней части является вспомогательным. Управление осуществляется переменной передачей крутящего момента на каждое их боковых колес.
- Li-Ion аккумулятор. Емкость батареи от 2 до 4 А/ч, чего достаточно для работы без подзарядки в течении 2-3 часов. Время полной зарядки от 3 до 9 часов.
- Щетки для уборки обеспечивают захват мусора и перемещение его к механизму всасывания.
- Пазы для полотера, предусмотрены в моделях для влажной уборки.
За передвижение и управление устройством отвечают электромоторы, которых, в зависимости от модели может быть 5 или 6.
- По одному мотору на каждое ведущее колесо.
- Один отвечает за работу механизма всасывания.
- Один управляет вращением боковой щетки (в моделях с двумя боковыми щетками задействовано два силовых агрегата).
- Последний отвечает за вращение турбощетки.
Навигационная система робота-пылесоса
 Система навигации позволяет прибору ориентироваться в пространстве. От точности работы системы навигации зависит качество уборки и алгоритм поведения робота-пылесоса. В данных устройствах может применяться одна из трех возможных навигационных систем. Рассмотрим их более детально.
Система навигации позволяет прибору ориентироваться в пространстве. От точности работы системы навигации зависит качество уборки и алгоритм поведения робота-пылесоса. В данных устройствах может применяться одна из трех возможных навигационных систем. Рассмотрим их более детально.
Датчики пылесоса
В передней части робота установлены ИК (инфракрасные) датчики для определения препятствий. На корпусе предусмотрен датчик удара, который заставляет менять алгоритм движения при столкновении с препятствием. Некоторые модели оснащаются ИК датчиком, по установленным в самой верхней точке корпуса. Его роль — определение пространства под мебелью, знать которое роботу необходимо, чтобы не застрять при уборке.
Внешние датчики
 Навигация по внешним датчикам осуществляется двумя способами:
Навигация по внешним датчикам осуществляется двумя способами:
- Виртуальная стена. Каждый датчик (посредством ИК лучей) создает невидимую стену, зафиксировав которую бот меняет направление движения. Таким образом, владелец зонирует пространство, ограничивая перемещения прибора в рамках определенного помещения.
- Маяки. Как работает навигация робота пылесоса по маякам? Очень просто: датчик подает непрерывный ИК-сигнал, потеря которого приводит к изменению траектории движения устройства.
Лазерная навигация
 Данный принцип ориентирования в пространстве считается самым совершенным. Бот оснащается лазерами, которые сканируют помещение, определяя расположение и расстояние до каждого объекта. Все данные заносятся в память устройства, обрабатываются, составляется карта помещения.
Данный принцип ориентирования в пространстве считается самым совершенным. Бот оснащается лазерами, которые сканируют помещение, определяя расположение и расстояние до каждого объекта. Все данные заносятся в память устройства, обрабатываются, составляется карта помещения.
Типы роботов-пылесосов
На сегодняшний день рынок бытовой техники предлагает потребителю три конструктивных решения роботов-пылесосов, различающихся своим назначением.
Для сухой уборки
Принцип действия роботизированного бытового пылесоса основан на вращении боковых щеток, которые отправляют мусор к основной турбине, расположенной по центру прибора. При помощи вращения турбо-щетки и механизма всасывания загрязнения попадают в пылесборник, который может быть выполнен в виде мешка или пластикового контейнера.
Для влажной уборки
На рынке представлены два вида устройств, принцип работы которых заключается в следующем:
- В дополнительные пазы крепится основание импровизированной швабры с салфеткой из микрофибры. В корпусе бота предусмотрен дополнительный контейнер, куда заливается вода или моющее средство. Прибор смачивает водой салфетку и проводит влажную уборку помещений.
- Робот-уборщик покрывает загрязнение моющим составом, после чего интенсивно растирает обработанное место. Далее, вся влага, при помощи механизма всасывания, собирается в контейнер, а остатки влаги убираются силиконовым скребком.
Комбинированные модели
Устройства смешанного типа могут удалять мусор с ковров и проводить влажную уборку при помощи салфетки из микрофибры на покрытиях из ламината, линолеума, кафеля. Допускается использовать приборы комбинированного типа для уборки паркетного пола с лаковым покрытием.
Принцип работы и алгоритм уборки робота-пылесоса
 Датчики системы навигации непрерывно сканируют пространство, регистрируя новые данные до 65 раз в секунду. Вся полученная информация посылается на процессор, который формирует алгоритм поведения бота.
Датчики системы навигации непрерывно сканируют пространство, регистрируя новые данные до 65 раз в секунду. Вся полученная информация посылается на процессор, который формирует алгоритм поведения бота.
В классическом варианте, алгоритм уборки робота пылесоса выглядит следующим образом:
- Прибор движется по спирали от центра.
- Достигая стены, двигается по периметру помещения.
- Сталкиваясь с препятствием робот движется вдоль него.
- Сталкиваясь со следующим препятствием прибор меняет направление движения и начинает двигаться вдоль следующего препятствия.
Так будет происходить до разряда АКБ (аккумуляторной батареи), после чего он находит базу и движется к ней на подзарядку.
Процесс уборки
Многих интересует, как работает современный робот пылесос? Работа такого «помощника» происходит в несколько этапов, большинство из которых скрыты от человека.
- Сбор данных. После запуска устройства, бот сканирует помещение, определяя его размеры, фиксируя первоначальное расположение мебели.
- Составление карты помещения и прокладка маршрута, который представляет собой прямые линии от стены до стены.
- Пуск системы всасывания, щеток и движение по запланированному маршруту.
Сам процесс уборки не представляет особого интереса для пользователя. Прибор методично перемещается по составленному маршруту. Одновременно с этим боковые щетки сметают весь мусор к центру прибора к центральной турбине, которая отбрасывает загрязнения в сторону мусороприемника, куда разрежением всасываются пыль, мелкий мусор, волосы и шерсть животных и пр.
Этапом окончания процесса уборки является возврат прибора на базу для подзарядки. Владельцу «питомца» останется только вовремя очищать мусоросборник, фильтрующие элементы.
Возвращение на базу для подзарядки
 Все современные роботы-уборщики являются беспроводными устройствами. Питание элементов прибора осуществляется от АКБ, которая разряжается во время уборки помещения. По достижению критических показателей емкости, бот начинает искать базу, для подзарядки. База оснащена инфракрасным маяком, на сигнал которого и движется прибор.
Все современные роботы-уборщики являются беспроводными устройствами. Питание элементов прибора осуществляется от АКБ, которая разряжается во время уборки помещения. По достижению критических показателей емкости, бот начинает искать базу, для подзарядки. База оснащена инфракрасным маяком, на сигнал которого и движется прибор.
На заметку! Более современные приборы с лазерной навигацией попросту заносят на виртуальную карту помещения расположение базы.
Дополнительные конструктивные элементы
В зависимости от модели и назначения, бытовые модели роботов-уборщиков могут оснащаться:
- Дополнительной центральной турбощеткой. Щетки вращаются навстречу друг другу, обеспечивая более качественное удаление все загрязнения.
- Второй боковой щеткой, которая расширяет зону очистки за один проход.
- Различными фильтроэлементами. Наиболее популярны среди наших соотечественников устройства с дополнительным НЕРА фильтром на выходе. Такая система тонкой очистки воздуха удаляет до 99,96% всех загрязнений, включая бактерии, споры грибков и плесени, пыльцу растений и пр.
Некоторые модели роботов-пылесосов оснащаются дополнительными датчиками грязи, которые определяют участки, нуждающиеся в особо тщательной чистке.
Нужен ли дома робот-пылесос
 Стоимость самой недорогой модели робота-пылесоса, на отечественном рынке, начинается от 3800 руб. Для того чтобы понять, есть ли смысл менять свой обычный пылесос на роботизированного помощника следует взвесить все достоинства и недостатки последнего.
Стоимость самой недорогой модели робота-пылесоса, на отечественном рынке, начинается от 3800 руб. Для того чтобы понять, есть ли смысл менять свой обычный пылесос на роботизированного помощника следует взвесить все достоинства и недостатки последнего.
- Уборка без участия человека. Это главное преимущество автоматического уборщика, которое позволяет поддерживать чистоту в помещении людям с ограниченными возможностями.
- Возможность запрограммировать график уборки. Аппарат будет поддерживать чистоту в квартире даже в отсутствие владельца.
Кроме этого, стоит отметить низкий уровень шума и возможность уборки под мебелью.
- При работе на влажной поверхности прибор требует регулярного обслуживания, так как пыль и влага способствуют размножению болезнетворных организмов.
- Крупные и вязкие загрязнения (кондитерские изделия, липкие следы напитков, экскременты животных и пр.) не будут очищены, а только размазаны по поверхности.
- Форма корпуса не позволяет прибору качественно убирать в углах помещения.
- Высокая стоимость.
Зная конструктивные особенности, принцип работы, все «за и против» потребитель может легко сделать вывод, насколько нужен ему роботизированный помощник в уборке квартиры.
Как сделать робот-пылесос своими руками
Относительно недавно в продаже появился робот-пылесос, который существенно упрощает процедуру уборки. Подобное устройство может в автоматическом режиме проводить сбор пыли и мусора. Собрать робот-пылесос своими руками в домашних условиях можно при применении специальных деталей и подручных материалов.

Теория
Самодельный робот-пылесос должен соответствовать различным требованиям. Основными можно назвать:
- Рекомендуется изготавливать конструкцию в форме небольшого цилиндра. Она исключает вероятность того, что устройство зацепится за различные объекты в помещении.
- Устройство должно разворачиваться на одном месте. Для этого нужно сделать колеса по периметру: 2 ведущих и 1 управляющий.
- Внутри конструкции должен располагаться приемник для мусора. Его форма и крепление должны обеспечивать легкое извлечение. При изготовлении контейнера часто применяется картон, верхняя крышка крепится магнитами. Предусматривается наличие фильтрующего элемента.
- Контактный бампер требуется для защиты пылесоса от ударов. Внутри этого элемента располагается датчик, срабатывающий при соприкосновении. Бампер изготавливается из поливинилхлорида, с наружной части может крепиться упругий материал.
- По периметру размещены ИК-датчики. Они предназначены для определения препятствий на пути.
- Зарядка устройства должна проводиться без разбора конструкции. Контроллер заряда позволяет исключить вероятность повреждения аккумулятора.
- Наилучшим местом для размещения центра тяжести являются колеса.
- Больше всего внимания уделяется выбору требуемого мотора. Он должен потреблять небольшое количество энергии, быть надежным.

Создать подобную конструкцию можно самостоятельно. Процесс делиться на несколько основных этапов:
- Подготовка требующихся материалов и инструментов.
- Изготовление основных частей.
- Монтаж датчиков, мотора, аккумулятора и других элементов.
- Выполняется электрическое подключение.
- Вводится требуемая программа, согласуется работа всех установленных датчиков.
Финишный этап предусматривает проверку работоспособности самодельного устройства.
Необходимые инструменты и материалы
Для изготовления самодельной конструкции требуются материалы и набор инструментов. Они следующие:
- Контролер типа Arduino с соответствующими драйверами. Этот элемент можно приобрести в специализированном магазине. Контроллер после установки рекомендуется защитить от воздействия окружающей среды.
- Лист фанеры применяется для создания основания. В некоторых случаях изготавливается корпус из поливинилхлорида, т. к. этот материал более надежный в применении.
- Для обеспечения подвижности устанавливается 3 колеса. Они должны быть небольшого размера, поверхность изготавливается из материала с высокой степенью сцепления.
- Провода сечением 0,75 мм² нужны для соединения отдельных элементов. Компактность конструкции определяет то, что требуется относительно небольшое количество провода.
- Блок питания представлен 4 аккумуляторами по 18V. Также уделяется внимание тому, какие используются зарядные устройства. На момент работы источник питания может нагреваться до высокой температуры. Поэтому батареи должны быть изолированы от других материалов.
- 4 инфракрасных и 2 контактных датчика используются для определения положения устройства. Инфракрасные размещаются по периметру, контактные располагаются внутри бампера.
- Клей, саморезы и другие крепежные элементы.
- Набор отверток, паяльник, нож, карандаш, шуруповерт и некоторые другие инструменты.

Картонный элемент изготавливается для получения основания. Щетки по бокам существенно повышают эффективность создаваемого устройства,
Чертеж
Самостоятельно изготовить чертеж сложно, его проще скачать с интернета. При выборе наиболее подходящего проекта уделяется внимание следующим моментам:
- Размеру пылесоса. От этого показателя зависит эффективность устройства. Рекомендуемый диаметр составляет 30 см, высота не более 15 см. В противном случае пылесос не сможет собирать пыль под невысокой мебелью.
- Размещению колес. На момент движения пылесос должен быть устойчивым. Рекомендуется создавать 2 ведущих, которые расположены параллельно, а также 1 управляющий, за счет которого проводится поворот устройства.
- Размеру контейнера для пыли и мусора. Этот элемент является основной частью конструкции.
- Расположению других элементов пылесоса.

При применении чертежа можно создать качественное устройство, которое сможет прослужить в течение длительного периода. Многие элементы самодельного пылесоса-робота придется приобрести в специализированном магазине.
Сборка
После подготовки всех требуемых материалов и инструментов можно провести непосредственную сборку робота-пылесоса. Инструкция выглядит следующим образом:
- Корпус диаметром 30 см создается из картона или поливинилхлорида. Рекомендуемая толщина стенок составляет 0,6 см, высота 9 см. Рекомендуется создать основание из фанеры, которое будет прочным.
- На созданном основании размещается бампер, который изготавливается из поливинихлорида. Рекомендуется перед установкой провести крепление контактного и ИК-датчика.
- Из фанеры или картона проводится создание контейнера для мусора с крышкой, которая фиксируется при помощи магнитов.
- Для обеспечения высокой эффективности устройства устанавливается фильтр. Его можно приобрести в специализированном магазине или изготовить самостоятельно. Самодельный фильтр создается из тканевых салфеток.
- Турбина изготавливается из компьютерных дисков. Его предназначение заключается в создании всасывающего потока. Материал компьютерных дисков может прослужить в течение длительного периода, обладает требуемой легкостью и эластичностью.
- Датчик подключается к контроллеру. Его предназначение заключается в обработке поступающих сигналов.
- Двигатель соединяется с выбранным контроллером через транзистор. Оба элемента отвечают за вращение и медленное перемещение.
- Устанавливается 4 выбранных аккумулятора. Подключение проводится при применении параллельной схемы. При этом нужно учитывать, что аккумуляторы создают нагрузку, которая требуется для необходимой степени колес с напольным основанием.
- Выбранные щетки или самодельные устройства, изготовленные из лески, устанавливаются на дно. Крепление может проводиться при применении клея.
- После непосредственной сборки конструкции следует провести загрузку программы при помощи компьютера. В интернете встречается большое количество управляющих программ, которые можно скачать бесплатно. Стоит учитывать, что для подключения компьютера требуется специальный переходник.
- Проверяется надежность крепления всех элементов.

Отдельные элементы конструкции соединяются при помощи клея или саморезов. Бампер должен быть жестким, т. к. после удара о препятствие он должен возвращаться в исходное положение.
Тестирование
После сборки самодельной конструкции можно приступить к ее тестированию. На этом этапе уделяется внимание нижеприведенным моментам:
- Проводится запуск устройства. Для этого нужно провести полную зарядку применяемых аккумуляторов.
- Нужно проследить за передвижением устройства, оно должно обходить все препятствия на своем пути.
Если перед роботом-пылесосом возникла виртуальная стена, то нужно провести калибровку установленных датчиков. Для этого проводится загрузка требующихся драйверов и управляющей программы.
DIY: Несложный робот пылесос под Arduino своими руками. Пошаговая инструкция по изготовлению
Популярность автоматизированных домашних уборщиков с каждым днем возрастает. Не исключение, роботы-пылесосы для сухой уборки, способные поддерживать чистоту пола без вашего вмешательства. Принцип работы этих устройств очень прост и схож на прицип работы ручного пылесоса, главным отличием является наличие микроконтроллера, набора датчиков для самостоятельной работы, подзарядки и ориентировании в пространстве. Об этом мы ранее описывали в целой статье, специально посвященной роботизированным уборщикам полов.
Если вы хотите узнать, как он устроен и построить его собственными руками, представляем вашему вниманию инструкцию по сборке простейшего робота-пылесоса из подручных средств.

Материалы и компоненты:
Для создания робота-уборщика необходимы:
- плата Arduino;
- плата контроля электромоторов Arduino motor shield;
- два двигателя с коробкой передач (3 вольта, приблизительно 100 оборотов в минуту);
- два колеса или две алюминиевые банки;
- турбина-кулер компьютерного охлаждения (5 В или 12 Вольт);
- аккумулятор для питания 5 вольт;
- пластина для сбора радиоэлементов и провода;
- большой круглый пластиковый контейнер — для корпуса;
- небольшой пластиковый контейнер — для мусоросборника;
- картон;
- термоклей;
- магниты.


Шаг 1: Программный код и скетч:
Для правильной и точной работы в роботе-пылесосе существует «сердце» в виде микроконтроллера Arduino, программируемого с помощью домашнего ПК и необходимого программного обеспечения.
Скетч для работы робота-пылесоса загружается на плату с помощью программы Arduino IDE. Ниже программный код.



/*
Program for controlling a robot with two motors.
The robot turns when motors changes their speed and direction.
Front bumpers on left and right sides detect obstacles.
Ultrasonic sonars can be connected to analog inputs (tested on LV-MaxSonar-EZ1):
— put pins in array sonarPins in following order: left, right, front, others..
Examples:
1. only left and right sonars connected to pins 2 and 3: sonarPins[] = <2,3>
2. left, right and front sonars connected to pins 2, 3 and 5: sonarPins[] = <2,3,5>
3. only front sonar connected to pin 5: sonarPins[] = <-1,-1,5>
4. only left sonar connected to pin 2: sonarPins[] = <2>
5. only right sonar connected to pins 3: sonarPins[] = <-1,3>
6. 5 sonars connected to pins 1,2,3,4,5: sonarPins[] = <1,2,3,4,5>
Motor shield is used to run motors.
*/
const int Baud = 9600; //UART port speed
//Sonar properties
int sonarPins[] = <1, 2>;//Analog Pin Nums to sonar sensor Pin AN
const long MinLeftDistance = 20; //Minimum allowed left distance
const long MinRightDistance = 20; //Minimum allowed right distance
const long MinFrontDistance = 15; //Minimum allowed front distance
const int SamplesAmount = 15;//more samples — smoother measurement and bigger lag
const int SonarDisplayFrequency = 10; //display only one of these lines — not all
int sonarDisplayFrequencyCount = 0;
const long Factor = 2.54 / 2;
long samples[sizeof(sonarPins)][SamplesAmount];
int sampleIndex[sizeof(sonarPins)];
//right side
const int pinRightMotorDirection = 4; //this can be marked on motor shield as «DIR A»
const int pinRightMotorSpeed = 3; //this can be marked on motor shield as «PWM A»
const int pinRightBumper = 2; //where the right bumper is connected
//left side
const int pinLeftMotorDirection = 7; //this can be marked on motor shield as «DIR B»
const int pinLeftMotorSpeed = 6; //this can be marked on motor shield as «PWM B»
const int pinLeftBumper = 8; //where the right bumper is connected
//uncomment next 2 lines if Motor Shield has breaks
//const int pinRightMotorBreak = PUT_BREAK_PIN_HERE; //this can be marked on motor shield as «BREAKE A»
//const int pinLeftMotorBreak = PUT_BREAK_PIN_HERE; //this can be marked on motor shield as «BREAKE B»
//fields
const int turnRightTimeout = 100;
const int turnLeftTimeout = 150;
//set in counter how long a motor is running back: N/10 (in milliseconds)
int countDownWhileMovingToRight;
int countDownWhileMovingToLeft;
//Initialization
void setup() <
Serial.begin(Baud);
initPins();
//uncomment next 4 lines if Motor Shield has breaks
// pinMode(pinLeftMotorBreak, OUTPUT);
// pinMode(pinRightMotorBreak, OUTPUT);
// digitalWrite(pinLeftMotorBreak, LOW); //turn off breaks
// digitalWrite(pinRightMotorBreak, LOW); //turn off breaks
runRightMotorForward();
runLeftMotorForward();
startMotors();
>
//Main loop
void loop() <
delay(10);//repeat every 10 milliseconds
>
//—————————————————
void initPins() <
pinMode(pinRightMotorDirection, OUTPUT);
pinMode(pinRightMotorSpeed, OUTPUT);
pinMode(pinRightBumper, INPUT);
pinMode(pinLeftMotorDirection, OUTPUT);
pinMode(pinLeftMotorSpeed, OUTPUT);
pinMode(pinLeftBumper, INPUT);
for(int i = 0; i MinRightDistance //checks if the minimum allowed right distance is not reached
&& measureDistance(2, ‘F’) > MinFrontDistance)//checks if the minimum allowed front distance is not reached
return;
if(checkCounterIsNotSet(countDownWhileMovingToRight))//if the counter is not yet counting down
runRightMotorBackward();//run the right motor backward
countDownWhileMovingToRight = turnRightTimeout;//set the counter to maximum value to start it counting down
>
void verifyAndSetLeftSide() <
if(checkBumperIsNotPressed(pinLeftBumper) //checks if left bumper has NOT been pressed
&& measureDistance(0, ‘L’) > MinLeftDistance //checks if the minimum allowed left distance is not reached
&& measureDistance(2, ‘F’) > MinFrontDistance)//checks if the minimum allowed front distance is not reached
return;
if(checkCounterIsNotSet(countDownWhileMovingToLeft))//if the counter is not yet counting down
runLeftMotorBackward();//run the right motor backward
countDownWhileMovingToLeft = turnLeftTimeout;//set the counter to maximum value to start it counting down
>
bool checkCounterIsNotSet(int counter) <
return counter = sizeof(sonarPins) — 1 || sonarPins[pinIndex] = SamplesAmount)
sampleIndex[pinIndex] = 0;
samples[pinIndex][sampleIndex[pinIndex]] = value;
return true;
>
long calculateAvarageDistance(int pinIndex) <
long average = 0;
for(int i = 0; i
Шаг 2: Монтирование деталей:
Для крепления сервоприводов с колесами, кулера, плат управления, аккумулятора и другого используется картонная основа. Турбина и пластиковый контейнер (мусоросборник), с проделанным предварительно отверстием, прочно склеивается между собой и крепится на картон. Контейнер имеет отверстие для выдуваемого воздуха, на которое наклеена специальная синтетическая ткань, служащая фильтром.
Последовательно склеиваем кулер с сервоприводами, затем на сервоприводы клеим картонную площадку, на которой располагаются платы Arduino и батарея питания. Чтобы сделать колеса, необходимо отрезать нижнюю и верхнюю часть алюминиевых банок, склеить их между собой, а затем прочно закрепить на валу сервопривода.
В передней части монтируются металлические пластины (функция подвижного бампера), при замыкании которых сигнал поступает в плату управления электродвигателями Arduino motor shield, после чего сервоприводы начинают вращаться в другую сторону, изменяя направление движения робота.




Шаг 3: Установка корпуса:
При установке аккумуляторной батареи и подключении всех элементов конструкции с помощью проводов, необходимо обеспечить устройство прочным корпусом. Как раз таки для этого используется большой круглый контейнер. Для действия контактов, предотвращающих столкновение и застревание, делаем в контейнере специальные надрезы. Чтобы корпус был легкосъемным и прочно держался на механической части, используем восемь магнитов (при желании можно больше), по четыре приклеенных на самом контейнере и на внутренней части пылесоса соответственно.




Прекрасный прототип робота-пылесоса, сделанного своими руками. Не беря во внимание отсутствие дополнительных датчиков навигации и базы автоматической подзарядки, данный аппарат за пол часа работы вполне самостоятельно может собрать мусор, пыль и грязь на вашей кухне или в небольшой комнате. Его конструкция не представляет большой сложности, а стоимость и доступность деталей не вызывает сомнения. Все дело в творческом подходе. Вы можете менять элементы конструкции по вашему усмотрению, добавлять или убирать лишние элементы, модернизируя свой аппарат. Желаем приятно провести время, создавая свой робот для сухой уборки полов у вас дома.
Датчик расстояния для робота пылесоса своими руками
Рис 3. Прототип устройства
Количество деталей минимально, фактически только обвязка Reset.
Устройство по данной схеме было собрано и некоторое время эксплуатировалось, при этом появились очевидные недостатки:
- быстрый разряд батареи поскольку включенное с утра выключалось только по приходу с работы;
- неудобство зарядки-приходилось разбирать корпус чтобы достать аккумуляторы;
- кнопка с фиксацией иногда по ошибке оставлялась или выключеной или наоборот включенной.
- Отсутствовал индикатор разряда
После чего схема была радикально переработана добавлена функция включения/отключения с одной кнопки, автоотключение по времени, индикация разряда и зарядное устройство.
Финальная схема представлена на рисунке 4.
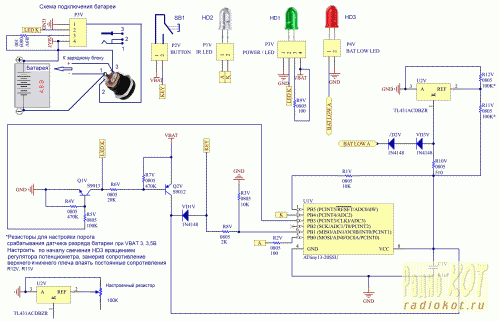
Рис. 4. Схема генератора.
Порядок работы устройства:
При нажатии на кнопку SB1 напряжение питания поступает на вывод 6 (PB1) и через диод VD1V на вход питания 8 (VCC) микроконтроллера U1V, после инициализации контроллера появляется высокий уровень на выводе 2(PB3), что приводит к открыванию транзисторов Q1V, Q2V при этом зажигается светодиод индикатора питания НV1.
После отпускания кнопки SB1 запускается бесконечный цикл генерации командного сигнала, несущая частота снимается на выводе 5 (OC0A) модулирующий сигнал на выводе 3 (PB4) присоединенных соответственно к аноду и катоду инфракрасного светодиода HV2, а на выводе 6 (PB1) устанавливается низкий уровень к которому вывод «притянут» через сопротивление R3V 10кОм, появлению же на PB1 высокого логического уровня с коллектора Q2V препятствует диод VD1V.
Для выключения устройства, достаточно нажать и удерживать кнопку SB1, при этом, на выводе 6 (PB1) устанавливается высокий уровень и после небольшой выдержки, программно, на выводе 2(PB3) уровень изменяется на низкий, транзисторы Q1V, Q2V закрываются индикатор питания НV1 гаснет, после отпускания кнопки SB1 устройство прекращает работу. В начальной версии вывод 2(PB3) был притянут к земле резистором, но практика использования показала, что достаточно внутреннего резистора контроллера и внешний резистор был исключен.
Принцип включения одной кнопкой сделан на примере из статьи опубликованной в журнале Радио №10 за 2002г. (стр. 26).
Индикатор разряда
Индикатор разряда батареи до 3..3,5В выполнен на TL431, светодиод НD3, включенный по инверсной схеме, светится только когда микросхема TL431 заперта.
Когда контролируемое значение напряжения превосходит уровень, определенный делителем R11V и R12V, микросхема TL431 открывается, и ток течет через сопротивление R10V и выводы 3-2 микросхемы TL431. На микросхеме в этот момент существует падение напряжения около 2В, и его явно не хватает для свечения светодиода. Для стопроцентного предотвращения загорания светодиода в его цепь дополнительно включены 2 диода типа 4148.
В момент, когда исследуемая величина окажется меньше порога определенного делителем R11V и R12V, микросхема TL431 закроется, и на ее выходе потенциал будет значительно выше 2В, вследствие этого светодиод HD3 засветится.
Зарядное устройство
Схема зарядного устройства взятая из Data Sheet на МС33340 приведена на рисунке 5 и не представляет какого либо научного интереса, работа ее описана в [5] там же есть программа для расчета. Расчет элементов выполнен под питание от 7,5 В/1500 мА сетевого адаптера снятого с древнего свича, это на пределе возможностей, но зато не греется LM317.
Разведенная плата зарядника у меня уже была сделана под адаптер на 18В, но поскольку в данном случае питающее напряжение не превышает 18В то устанавливать стабилизатор IC3 не потребовалось вместо него поставлена перемычка JVSS (например smd резистор 1206 с нулевым сопротивлением) под которую есть место на печатной плате. При желании схема может быть перерасчитана и на другое напряжение питания.
Для подключения сетевого адаптера установлен разъем типа DC-022 схема подключения указана на рисунке 4. При подключении внешнего адаптера размыкаются контакты 2 и 3 разъема разрывая «земляную» цепь питания генератора, загорается светодиод индикатора зарядного питания HL2. О исправности зарядного устройства и нормальном ходе зарядки можно судить по непрерывному миганию светодиода «контроль заряда» HL1. После того как индикатор HL1 перестанет мигать и будет светить непрерывно, адаптер можно отключить, батареи заряжены.

Рис 5. Схема зарядного устройства.
Использованы компоненты SMD для уменьшения количества сверлений и габаритов. Список деталей приведен таблице по ссылке в конце статьи.
Для подключения сетевого адаптера установлен разъем типа DC-022
Батарейный отсек на 4 аккуимултора АА типа KLS5-809-B
Замена транзисторов Q1V, Q2V возможна на любые подходящие с током коллектора не менее 300мА например BC807,BC817 в корпусе SO-23-3.
Файл прошивки в формате .hex находится в архиве по ссылке в конце статьи.
В настройках фузов достаточно выбрать внутренний источник тактирования «Внутренний RC генератор 9,6МГц». И отключить внутренний делитель на 8 (CLKDIV8).
Программа написана на C в WinAVR ссылка на исходник внизу страницы. Прошивка ATTINY13 формата SOP-8 выполнялась пограмматором AWRProg в самодельной зажимной колодке, как вариант программировать можно при распаяной на плату одной микросхеме контроллера с обвязкой по RESET путем подпайки проводов на нужные контактные площадки, затем установить остальные детали, проверить работоспособность и провода программатора отпаять от контроллера. При проверке работоспособности программатор необходимо отключать.
Сборка и настройка.
Печатная плата односторонняя под SMD монтаж (с одной маааленькой перемычкой S1) разработана в ALTIUM, герберы годные под ЛУТ и на завод приложены к статье.
расположение элементов на плате показано на Рисунке 6
